Warnung
Sie lesen eine alte Version dieser Dokumentation. Wenn Sie aktuelle Informationen wünschen, schauen Sie bitte unter 5.4 .Was ist eine Hand-Augen Kalibrierung?
Es geht darum, die relative Position und Orientierung zwischen einer starr montierten Kamera und dem letzten Gelenk des Robotergreifers zu finden. Das Ziel der Hand-Augen Kalibrierung ist es, die X,Y-Koordinaten der erkannten Teile aus dem Vision-Koordinatensystem (VCF) in das Roboterkoordinatensystem (RCF) zu überführen.
Nach der Hand-Augen Kalibrierung ist EYE+ im Stande, direkt nach jeder Bildaufnahme die Roboterkoordinaten (im Roboterkoordinatensystem) zu senden.
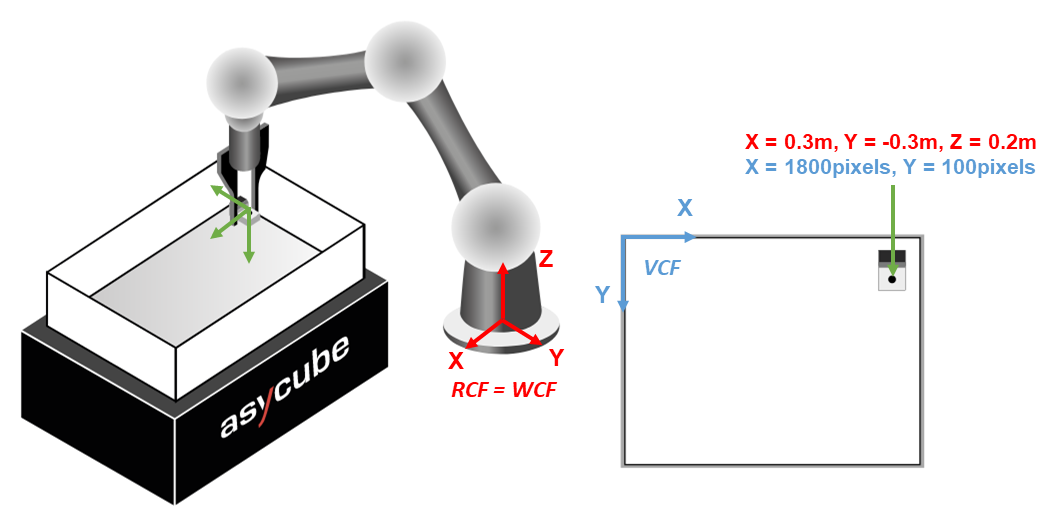
Abb. 186 Darstellung der Hand-Augen Kalibrierung; RCF: rotes Koordinatensystem; VCF: blaues Koordinatensystem.
Wie wird es gelöst?
Das mathematische Problem hat die Form der affinen Transformation:
wobei \(X_r\) die Koordinaten \((x,y)\) im Roboterkoordinatensystem und \(X_c\) die Koordinaten \((x,y)\) im Kamera-Koordinatensystem sind. Die Transformationsmatrizen \(A\) und \(B\) werden aus der Hand-Augen Kalibrierung abgeleitet. Dank dieser können die Koordinaten im Robotersystem aus den Koordinaten im Visionssystem abgeleitet werden.
Warnung
Der Höhenunterschied zwischen den beiden Koordinatensystemen wird von EYE+ nicht berücksichtigt. Die Hand-Augen Kalibrierung führt nur eine Koordinatentransformation der Positionen \((x,y)\) durch. Ihr Roboter muss sich des Höhenunterschieds zwischen seinem Koordinatensystem und der Platte sowie des Höhenunterschieds zwischen der Platte und der Höhe des Teils bewusst sein.
Genauigkeit der Kalibrierung
Die in Schritt 6 angezeigte Genauigkeit der Kalibrierung entspricht dem quadratischen Mittelwert des Fehlers bei der Reprojektion der vier Punkte. Die Reprojektionen sind die inversen Transformationen der 4 in das Vision-Koordinatensystem projizierten Roboterpunkte.
Je kleiner der Wert für die Kalibriergenauigkeit ist, desto besser ist die Kalibrierung.