Warnung
Sie lesen eine alte Version dieser Dokumentation. Wenn Sie aktuelle Informationen wünschen, schauen Sie bitte unter 5.4 .Can take image
Die Bildaufnahme ist standardmässig aktiviert. Bei Bedarf kann mit dem Befehl can_take_image false die Bildaufnahme deaktiviert werden.
Es kann sinnvoll sein, die Bildaufnahme zu deaktivieren, um sicherzustellen, dass kein Bild aufgenommen wird, während sich der Roboter noch im Sichtfeld der Kamera befindet. Wenn Sie z. B. die Bildaufnahme deaktivieren und den Befehl get_part (Abb. 203) senden, wird der Befehl nicht ausgeführt werden können (da dafür eine Bildaufnahme durchgeführt werden müsste).
Die Bildaufnahme ist hängig, bis der Befehl can_take_image wieder aktiviert wird. Sobald dieser reaktiviert wird, nimmt das System den hängigen Befehl mit seinem üblichen Verhalten wieder auf.
Bemerkung
Die währned can_take_image false verstrichene Zeit wird für das timeout berücksichtigt.
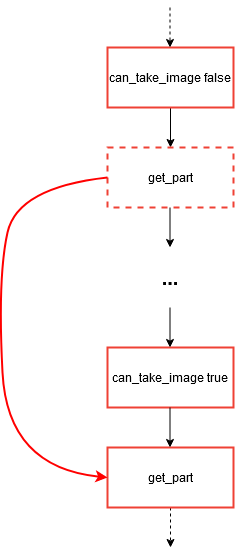
Abb. 203 can_take_image Szenario