Warnung
Sie lesen eine alte Version dieser Dokumentation. Wenn Sie aktuelle Informationen wünschen, schauen Sie bitte unter 5.4 .3. Ergebnisse
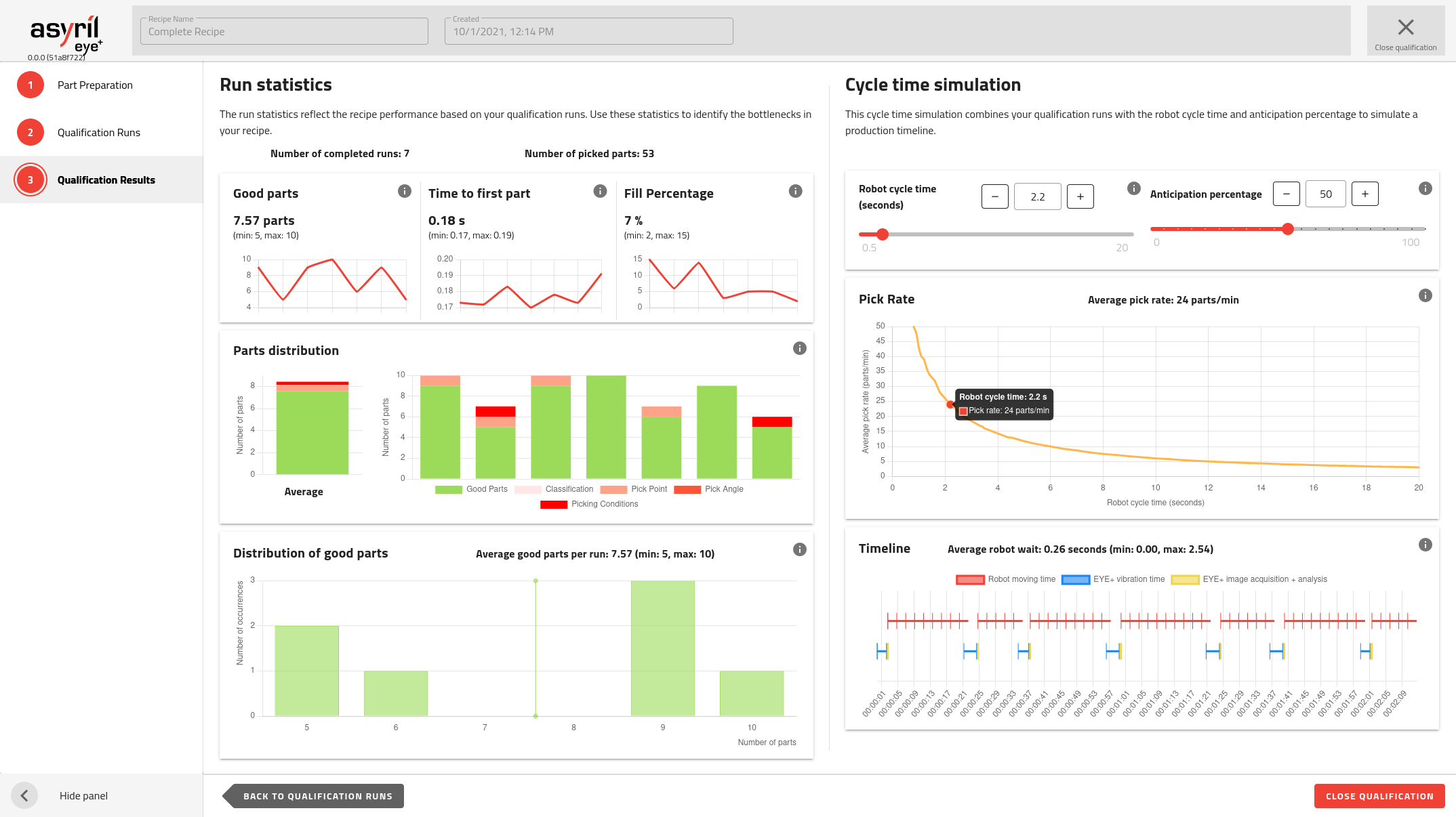
Abb. 133 Ergebnisse der Qualifizierung
Diese Seite verwendet alle gesammelten Informationen und zeigt sie als Zusammenfassung aller Läufe an, die Sie im vorherigen Schritt durchgeführt haben. Danach können Sie einige Parameter einstellen, um eine Produktions-Zeitleiste zu simulieren.
Bemerkung
Die allererste Bildaufnahme sowie die erste Vibration werden bei der Berechnung nicht berücksichtigt.
Statistiken der Läufe
Die Statistiken der Läufe spiegeln die Leistung des Rezepts auf der Grundlage der Qualifikationsläufe wider.
Tipp
Diese Statistiken sind sehr nützlich, um die Engpässe im Rezept zu ermitteln.
Tipp
Sie können zusätzliche Läufe hinzufügen, indem Sie zum vorherigen Schritt zurückgehen (alle vorherigen Daten bleiben erhalten).
Gute Teile

Abb. 134 Statistiken der Läufe - Anzahl guter Teile
Das Diagramm zeigt die Entwicklung der Anzahl guter Teile über alle Qualifizierungsläufe.
Der Durchschnittswert dieses Indikators über alle Qualifikationsläufe wird angezeigt, ebenso wie der Mindest- und Höchstwert (in Klammern).
Tipp
Wenn keine guten Teile gefunden werden, ist eine zusätzliche Vibrationssequenz erforderlich. Dies hat einen entscheidenden Einfluss auf die Wartezeit des Roboters.
Zeit bis zum ersten Teil
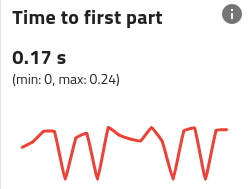
Abb. 135 Statistiken der Läufe - Zeit bis zum ersten Teil
Das Diagramm zeigt über alle Qualifikationsläufe hinweg die Entwicklung der Zeit, die das System benötigte, um das erste gute Teil zu finden.
Der Durchschnittswert dieses Indikators über alle Qualifikationsläufe wird angezeigt, ebenso wie der Mindest- und Höchstwert (in Klammern).
Bemerkung
Dieser Indikator spiegelt direkt wider, wie optimiert Ihr Vision-Rezept ist.
Tipp
Um es zu verbessern, sollten Sie die Anzahl der schlechten Teile, die den Schritt der Kandidatenauswahl erreichen, reduzieren und beim Einlernen des Entnahmepunkts und des Entnahmewinkels alle unnötigen Merkmale ausblenden.
Füllungsgrad
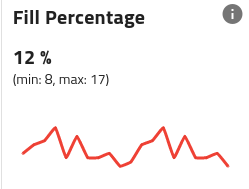
Abb. 136 Statistiken der Läufe - Füllungsgrad
Das Diagramm zeigt die Entwicklung des durch die Bildanalyse gemessenen Füllungsgrads über alle Qualifikationsläufe hinweg.
Der Durchschnittswert dieses Indikators über alle Qualifikationsläufe wird angezeigt, ebenso wie der Mindest- und Höchstwert (in Klammern).
Verteilung der Teile
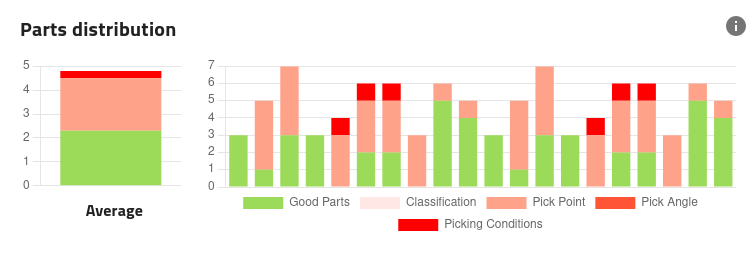
Abb. 137 Statistiken der Läufe - Verteilung der Teile
Das Diagramm auf der rechten Seite zeigt für jeden Qualifizierungslauf die Verteilung der Teile zwischen akzeptierten und verworfenen Teilen an.
Das Diagramm auf der linken Seite zeigt die durchschnittliche Verteilung über alle Qualifikationsläufe.
Tipp
Verwenden Sie diese Diagramme, um zu ermitteln, welcher Schritt des Rezepts verbessert werden könnte.
Verteilung der guten Teile
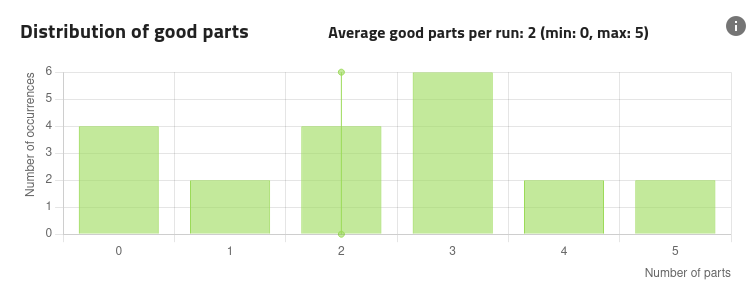
Abb. 138 Statistiken der Läufe - Verteilung der guten Teile
Das Diagramm zeigt die Verteilung der während der Qualifizierungsläufe gemessenen Anzahl guter Teile.
Bemerkung
Wenn die Vibrationssequenz länger ist als die Dauer des Roboterzyklus, muss der Roboter zwischen den einzelnen Vibrationssequenzen warten. Die durchschnittliche Anzahl der guten Teile pro Lauf gibt einen Hinweis darauf, wie häufig diese Wartezeit auftreten wird.
Tipp
Wenn keine guten Teile gefunden werden, ist eine zusätzliche Vibrationssequenz erforderlich. Dies hat einen entscheidenden Einfluss auf die Wartezeit des Roboters.
Simulation der Zykluszeit
In diesem Abschnitt werden die Qualifizierungsläufe mit der theoretischen Zykluszeit und der prozentualen Antizipation des Roboters kombiniert, um eine Produktions-Zeitleiste zu simulieren.
Benutzen sie diese Simulation, um zu ermitteln, wie sich die Vibrationssequenz und die Bildanalyse auf Ihre Produktionszeiten auswirken.
Roboterzykluszeit
Um die Simulation berechnen zu können, muss die Dauer des Roboterzyklus eingegeben werden. Dieser Wert kann geändert werden, um die Auswirkungen auf die Entnahmerate und die Wartezeit des Roboters zu ermitteln.
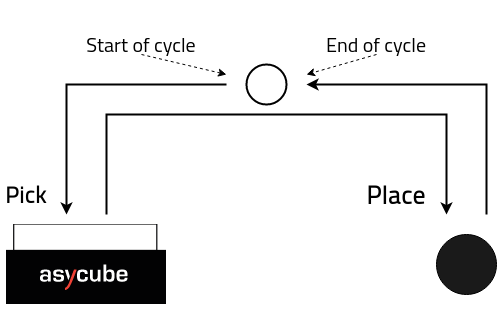
Abb. 139 Illustration des Pick-and-Place-Zyklus des Roboters
Prozentuale Antizipation
Ebenfalls mit dem Roboter verknüpft ist die prozentuale Antizipation. Sie stellt den prozentualen Anteil der Zykluszeit dar, in der EYE+ für bessere Leistungen vibrieren/ein Bild aufnehmen darf, während sich der Roboter noch bewegt. Wie der Name schon sagt, bezieht sich dieser Prozentsatz auf die letzten X % der Zykluszeit, wobei X die prozentuale Antizipation darstellt. Wenn Sie diesen Wert beispielsweise auf 20% bei einer Zykluszeit von 1000 ms einstellen, kann EYE+ nach 800 ms (die letzten 20%) vibrieren/ein Bild aufnehmen.
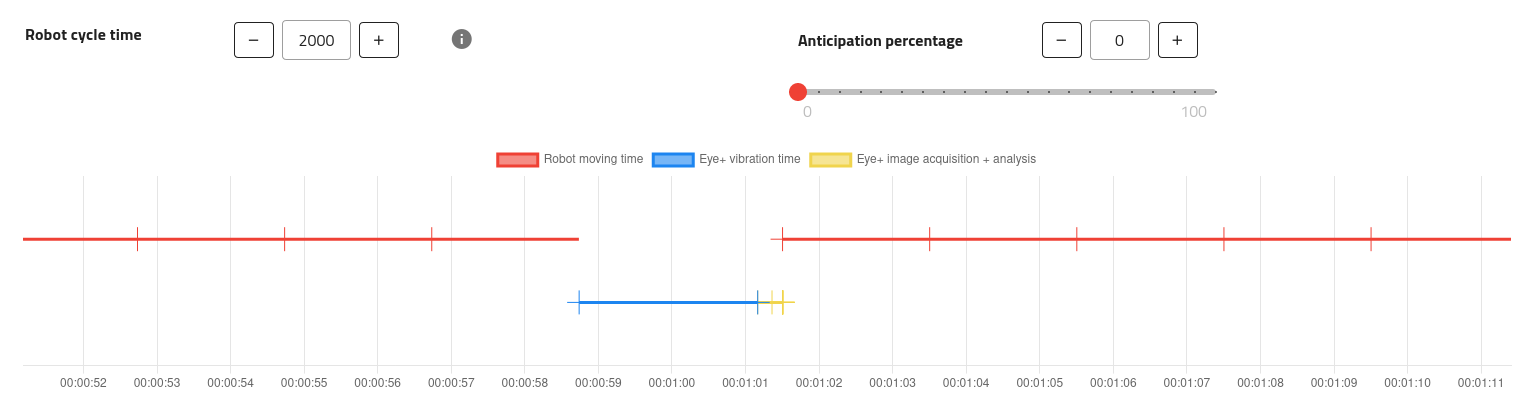
Abb. 140 Zeitleiste mit 0% Antizipation
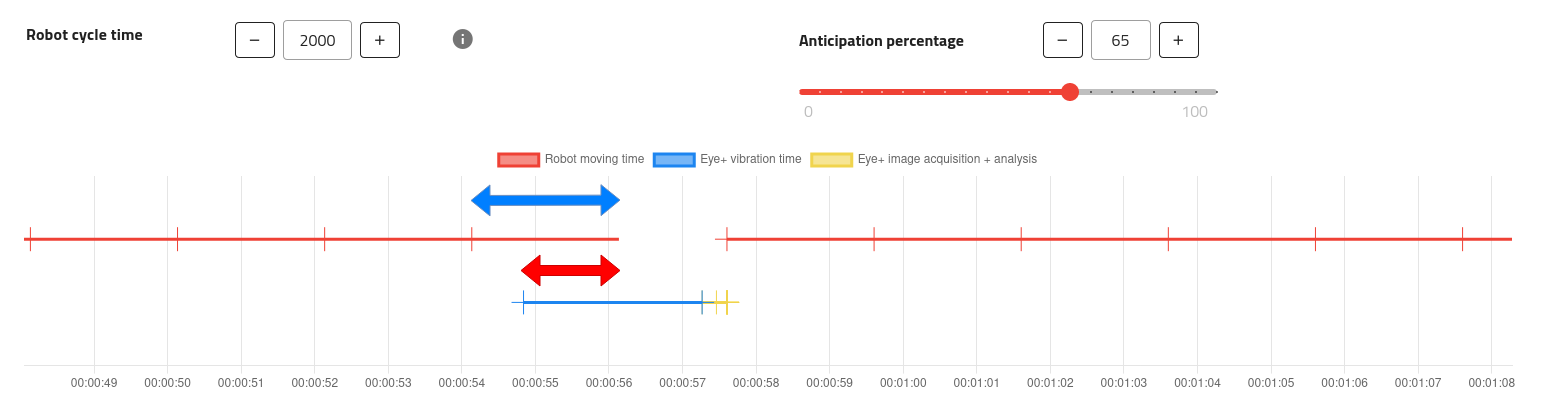
Abb. 141 Zeitleiste mit 65% Antizipation
In der obigen Abbildung entspricht der rote Pfeil genau 65% des blauen Pfeils (1300ms gegenüber 2000ms), da als prozentuale Antizipation 65% gesetzt wurde.
Bemerkung
Eine Änderung dieses Prozentsatzes nach der Durchführung eines einzigen Laufs führt zu keinen Unterschieden in den Daten, da keine nächste Vibration antizipiert wird.
Entnahmerate
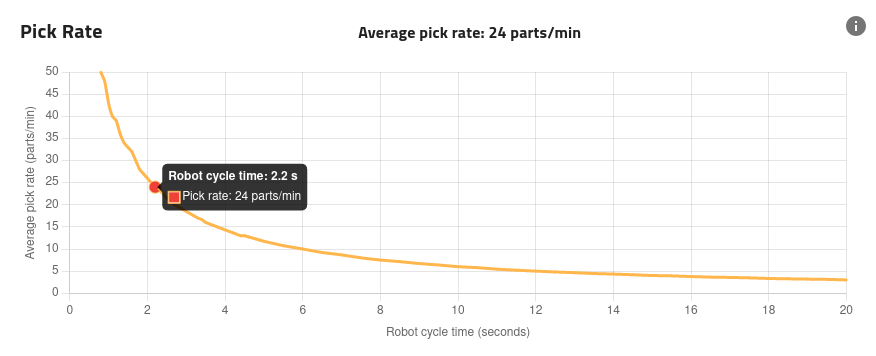
Abb. 142 Simulation der Zykluszeit - Entnahmerate
Die Entnahmerate wird anhand der Daten aus den Qualifizierungsläufen berechnet und variiert, wenn die prozentuale Antizipation geändert wird.
Anhand dieses Diagramms können Sie die Roboterzykluszeit ermitteln, die Sie benötigen, um die gewünschte Entnahmerate zu erreichen.
Zeitleiste
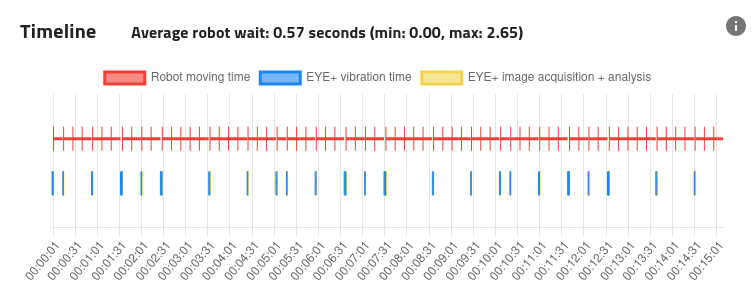
Abb. 143 Simulation der Zykluszeit - Zeitleiste
Die Zeitleiste enthält zwei verschiedene Serien, die obere betrifft den Roboter, die untere EYE+. Die Leiste des Roboters zeigt mit einem vertikalen Balken an, wann der Roboter eine Antwort auf einen get_part Befehl erhält. Jeder Balken auf derselben durchgehenden Linie ist durch den Wert der Roboterzykluszeit getrennt, die Sie über das entsprechende Feld einstellen können.
Die Serie betreffend EYE+ zeigt folgende Informationen an: den Zeitpunkt, an dem der angeschlossene Asycube eine Vibrationssequenz ausgeführt hat, deren Dauer sowie alle Vision-Ereignisse, einschliesslich des Zeitpunkts, an dem ein Bild aufgenommen wurde oder die Koordinaten eines guten Teils bereit waren, mit dem Befehl get_part an den Roboter übermittelt zu werden.
Tipp
Sie können mit der Maus entlang der Zeitachse hinein-/herauszoomen, um sich auf bestimmte Zeitpunkte zu konzentrieren.