Warnung
Sie lesen eine alte Version dieser Dokumentation. Wenn Sie aktuelle Informationen wünschen, schauen Sie bitte unter 5.4 .Was führt die Vision-Kalibrierung durch?
Welche Korrekturen werden mit dem Schachbrett gemacht?
Korrektur der Bildverzeichnung: Nachdem die Kalibrierung erfolgt ist, wird die Verzeichnung bei jeder Bildaufnahme automatisch korrigiert.
Bemerkung
Weitere Informationen darüber, was eine Verzeichnung ist und wie sie korrigiert wird, finden Sie im Abschnitt Verzeichnungskorrektur.
Definieren des Untersuchungsbereichs (ROI): Der Untersuchungsbereich (region of Interest ROI) ist der Restbereich der Bilder, der später für die Bildanalyse verwendet wird. Es ist eine Möglichkeit, Bildbereiche auszusondern, die nicht für die Bildanalyse verwendet werden:
Die linke und rechte Seite der Bilder umfassen immer Bereiche, die sich ausserhalb des Asycubes befinden.
Wenn in Ihrer Integration immer der gleiche Teil des Bildes von einem anderen Gerät (Bunker, Roboter, Beleuchtung, …) verdeckt wird, wird dieser Teil automatisch aus dem ROI ausgeschieden.
Wichtig
Stellen Sie daher sicher, dass Sie die gleiche Systemintegration wie bei der Produktion haben, um das Ausblenden unerwünschter Bildbereiche zu gewährleisten.
Bauen Sie Bunker, Roboter, Beleuchtung (usw…) nicht auseinander, nur um ein besseres Kalibrierungsergebnis zu erzielen! Dies kann zu Bildanalysefehlern bei der Bearbeitung von Rezepten oder während der Produktion führen.
In Abb. 160 ist der Untersuchungsbereich durch das grüne Rechteck dargestellt, das das Schachbrett umgibt.
Bestimmung der Pixel-Millimeter- oder Pixel-Zoll-Skala: Der Ursprung und die Ausrichtung des Vision-Koordinatensystems ändern sich nicht (Abb. 223). Das Koordinatensystem geht vor der Vision-Kalibrierung von 0 bis 3072px auf der X-Achse und von 0 bis 2048px auf der Y-Achse. Nach der Vision-Kalibrierung geht das Koordinatensystem von 0 bis zur Bildbreite in Millimetern/Zoll und von 0 bis zur Bildhöhe in Millimetern/Zoll (Tab. 34).
Tab. 34 Änderung der Vision-Koordinaten Vor der Kalibrierung
Nach der Kalibrierung
Referenz
X
Y
X
Y
Punkt 1
0
0
0
0
Punkt 2
3072px
0
Breite
0
Punkt 3
0
2048px
0
Höhe
Punkt 4
3072px
2048px
Breite
Höhe
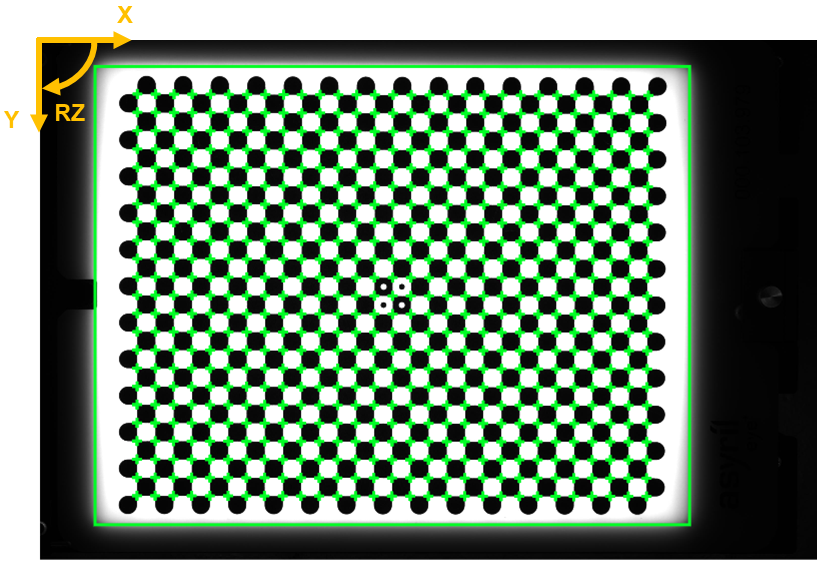
Abb. 223 Vision-Koordinatensystem
Verzeichnungskorrektur
Das Hauptziel der Vision-Kalibrierung ist die Korrektur der Verzeichnung.
Die Verzeichnung ist ein monochromatischer optischer Abbildungsfehler, der bei einem festen Arbeitsabstand zu einer Variation der Vergrösserung im Bild führt. Ein Bild eines Schachbretts, das einer Verzeichnung unterliegt, erzeugt gekrümmte Linien anstelle von geraden Linien (linkes Schachbrett in Abb. 224).
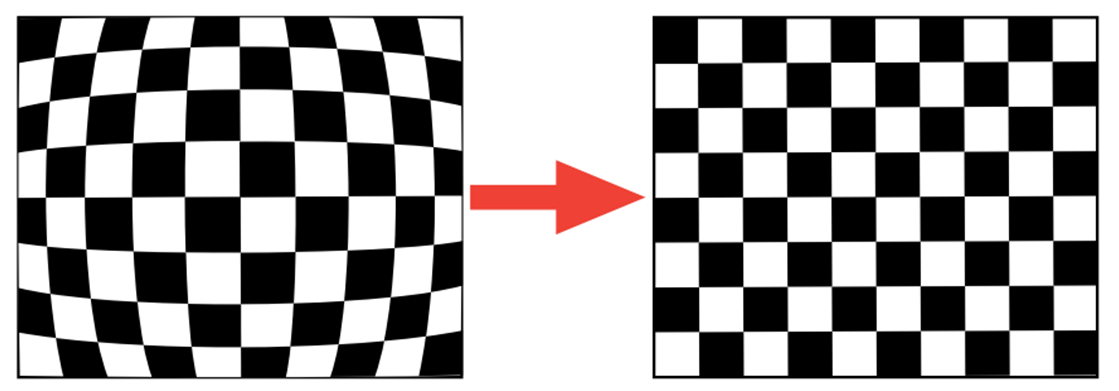
Abb. 224 Korrektur der optischen Verzeichnung (links: vor der Kalibrierung, rechts: nach der Kalibrierung)
Die Verzeichnung reduziert technisch gesehen die im Bild enthaltene Information nicht, da sie die Informationen nur geometrisch verschiebt. Dies bedeutet, dass die Verzeichnung effektiv aus einem Bild berechnet und somit ohne grossen Informationsverlust korrigiert werden kann.
Ein Verzeichnungsmodell wird berechnet, indem die Verzeichnungsparameter und die Parameter der intrinsischen und extrinsischen Eigenschaften einer Kamera ermittelt werden, die zu den Linien des Schachbretts auf dem verzerrten Bild passen. Das Modell versucht, die gekrümmten Linien zu rekonstruieren. Sobald diese Parameter gefunden sind, kann die Verzeichnungskorrekturtransformation auf das verzerrte Bild angewendet werden.
Bemerkung
Die Verzeichnungskorrekturtransformation ist eine mathematische Operation, die auf den Verzeichnungsparametern basiert und auf das Bild angewendet wird. Sie wird auf jedes aufgenommene Bild angewendet, bevor eine Bildanalyse durchgeführt wird.
Abb. 160 zeigt ein Bild des Schachbretts vor (links) und nach (rechts) der Verzeichnungskorrektur. Die erkannten Schachbrettecken werden durch grüne Kreuze dargestellt.
RMS-Fehler
Im Schritt 9. Ergebnisse der Kamerakonfiguration ist die Wurzel der mittleren Fehlerquadratsumme (root mean square error RMS) der Verzeichnungsrekonstruktion angegeben. Dies ist der durchschnittliche Fehler zwischen dem erwarteten Schachbrett und dem aus der Verzeichnungsrekonstruktion resultierenden Schachbrett. Je näher der Reprojektionsfehler bei Null liegt, desto genauer sind die gefundenen Parameter.
Warnung
Wenn der RMS-Fehler grösser als 1 ist, ist die Korrektur nicht anwendbar.
Bemerkung
Das Schachbrett wird auch zur Bestimmung der Pixel-Millimeter- oder Pixel-Zoll-Skala verwendet, die in den Ergebnissen im Schritt 9 dargestellt wird.
Korrektur der Parallaxe
Indem Sie die Höhe der Kamera im Schritt 7 (Arbeitsabstand) angeben, kann das System die Parallaxe korrigieren, wenn Sie bei der Rezeptbearbeitung die Höhe des Teils angeben.
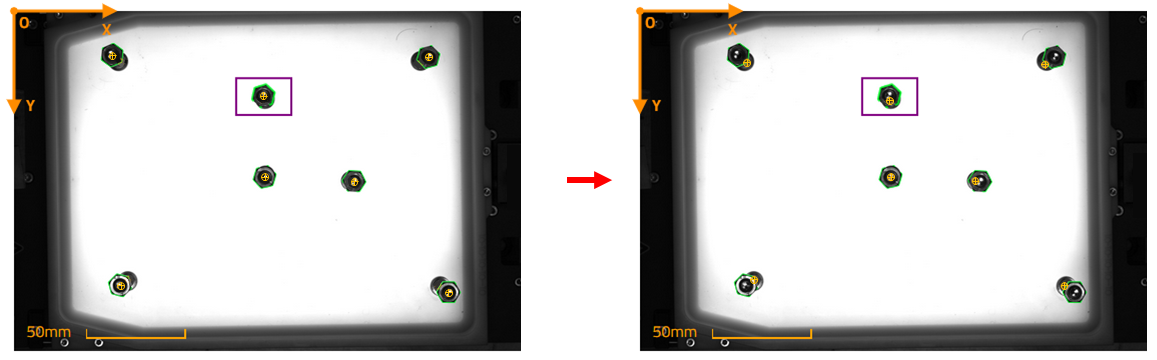
Abb. 225 Links: Vor der Korrektur der Parallaxe; Rechts: Nach der Korrektur der Parallaxe; Die gelbe Zielscheibe entspricht dem Entnahmepunkt
Die Parallaxe ist ein Unterschied in der scheinbaren Position eines Objekts, das entlang zweier unterschiedlicher Sichtlinien betrachtet wird. Bei Anwendungen in EYE+ kann das 2D-Bild der Teile aus dem Blickwinkel der Kamera eine Perspektive zwischen der Ober- und Unterseite der Teile einführen, wenn die Teile hoch sind und weit vom Zentrum des Asycubes entfernt sind. Die obere Fläche ist gegenüber der unteren Fläche versetzt. Dieses Phänomen führt zu einer Verschiebung der Koordinaten des Entnahmepunkts. Je höher das Teil ist, desto grösser ist die Parallaxe.
In der in Abb. 226 dargestellten Situation führt die Parallaxe aus Sicht der Kamera zu einer Verschiebung der Zylinderoberseite nach rechts in Bezug auf die Basis des Zylinders (rechter Zylinder). Die Abweichung auf der Y-Achse aufgrund der Parallaxe entspricht dem Abstand e zwischen dem gelben Punkt (reale Position) und dem roten Punkt (von EYE+ erfasste Position: diese Position ist aufgrund der Perspektive verschoben). Der gelbe Punkt entspricht der korrigierten Position des auf die Kameraebene (horizontale schwarze gestrichelte Linie) projizierten Zylindermittelpunkts.
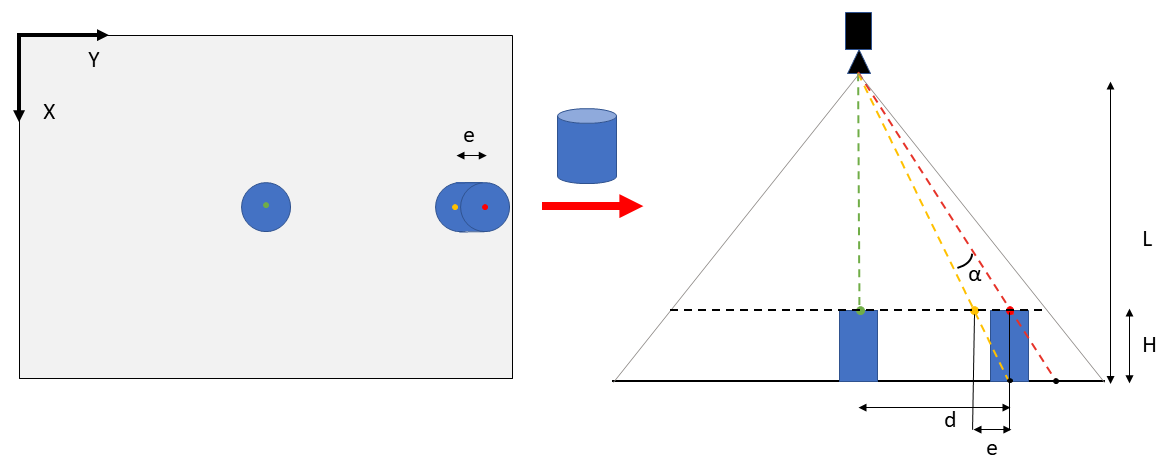
Abb. 226 Korrektur der Parallaxe für einen Zylinder (links: Obenansicht, rechts: Seitenansicht). Gelber Punkt: reale Entnahmeposition; Roter Punkt: durch EYE+ erkannte Position ohne Korrektur der Parallaxe.
Tipp
Stellen Sie sich das verkleinerte Bild der unteren Ebene (horizontale schwarze Linie) auf die Kameraebene (gestrichelte schwarze Linie) projiziert vor. Die Bildgrösse wird um R skaliert, damit das Bild im Sichtkegel bleibt.
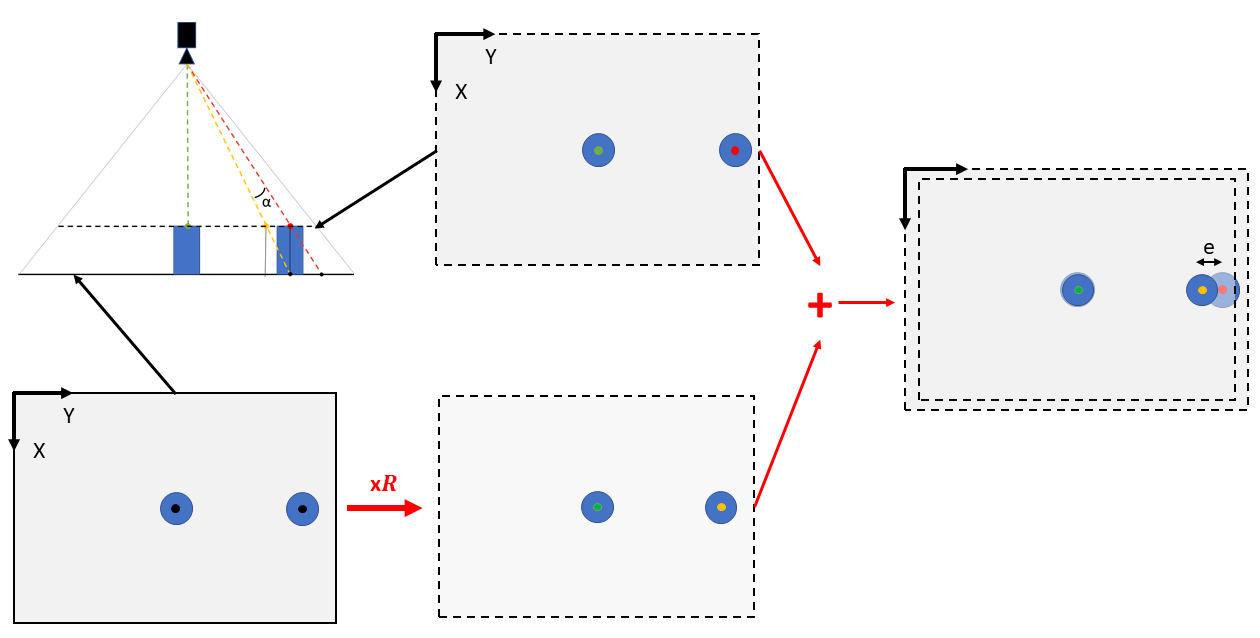
Abb. 227 Ansicht von oben der Projektion der unteren Ebene (horizontale schwarze Linie) auf die Kameraebene (horizontale schwarze gestrichelte Linie). Die Projektion ist um R skaliert.
EYE+ korrigiert die durch die Variation der Position der Teile auf der Oberfläche des Asycubes entstehende Parallaxe, indem entsprechend der Position des Teils auf der Asycube-Platte ein Offset auf seine X- und Y-Koordinaten addiert wird. Ein Teil, das sich am Rand der Platte befindet, hat einen grösseren Offset als ein Teil, das sich in der Mitte der Platte befindet. Um diese Offsets zu berechnen, muss das System die Höhe des Teils und die Höhe der Kamera kennen.
Bemerkung
Die Korrektur der Parallaxe wird nicht bei der Konfiguration der Kamera durchgeführt, sondern später, wenn Sie dem System die Höhe des Teils für die Berechnung der Koordinaten zur Verfügung stellen.