Warnung
Sie lesen eine alte Version dieser Dokumentation. Wenn Sie aktuelle Informationen wünschen, schauen Sie bitte unter 5.4 .5. Entnahmewinkel einlernen
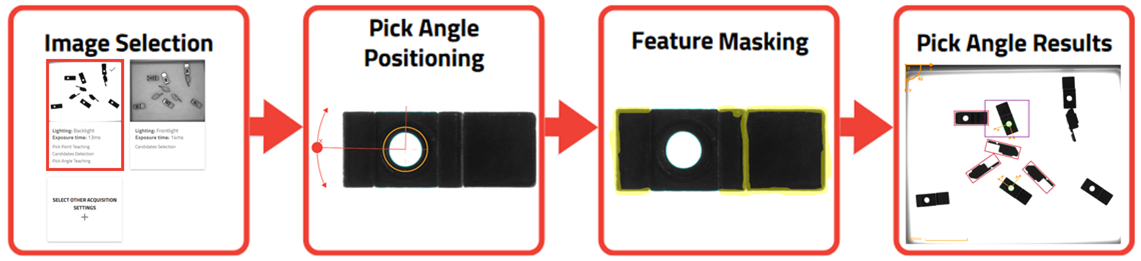
Abb. 100 Übersicht über das Einlernen des Entnahmewinkels
Je nach Geometrie Ihrer Teile müssen Sie möglicherweise den Winkel des Teils für die Entnahme durch den Roboter kennen. Der Zweck dieses Schritts besteht darin, dem System ein neues Referenzmodell (basierend auf demselben Referenzkandidaten) beizubringen und die relative Ausrichtung des Teils in Bezug auf dieses Modell anzugeben.
Das Referenzmodell wird anhand der Eigenschaften des Referenzkandidaten definiert, der bereits im vorherigen Schritt verwendet wurde. Von den Referenz-Eigenschaften ausgehend wird die Ausrichtung des Teils anhand der X- und Y-Achsen definiert.
Der Ausrichtungswinkel des Teils dient dazu, den RZ-Winkel der Kandidaten zu definieren, den EYE+ sendet wenn get_part ausgeführt wird.
Bemerkung
Dieser Schritt ist optional, er kann übersprungen werden, wenn Ihr Teil keinen Entnahmewinkel hat. Um diesen Schritt zu überspringen, klicken Sie auf .
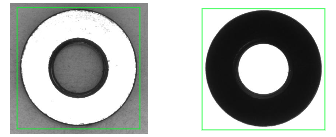
Abb. 101 Eine Unterlegscheibe z.B. hat keinen Entnahmewinkel (Frontalbelichtung: links, Hintergrundbeleuchtung: rechts)