Warnung
Sie lesen eine alte Version dieser Dokumentation. Wenn Sie aktuelle Informationen wünschen, schauen Sie bitte unter 5.4 .Beispiel - Siemens TIA Portal
Dieser Abschnitt zeigt ein Beispiel einer einfachen Integration von EYE+ mit dem PROFINET-Modul in Siemens TIA Portal.
Voraussetzungen
- Bevor Sie beginnen, laden Sie bitte folgende Dateien herunter:
EYE+ PROFINET GSDML-Datei (Electronic datasheet)
TIA Portal Beispielcode
Diese Dateien können unter PROFINET Downloads heruntergeladen werden.
Bitte folgen Sie nachdem Sie die notwendigen Dateien heruntergeladen haben den im Abschnitt Bevor Sie beginnen beschriebenen Schritten.
Basis-Integration
Importieren Sie zunächst den TIA-Beispielcode.
Abb. 281 Importieren der TIA-Beispielcode-Bibliothek
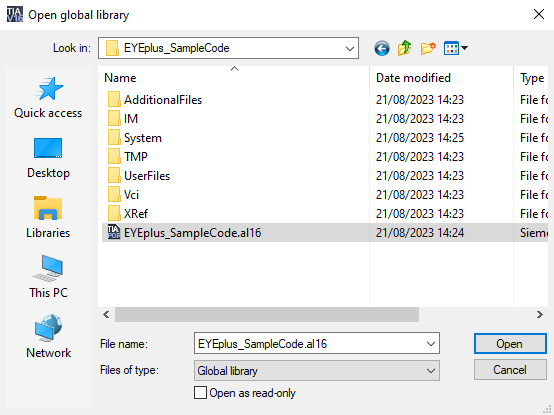
Abb. 282 Auswählen der .al16-Datei
Importieren Sie alle folgenden Komponenten in Ihr TIA-Projekt:
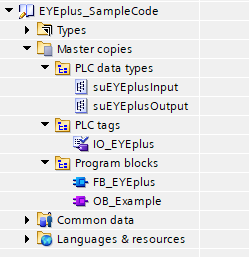
Abb. 283 Ziehen Sie die Bibliotheksdateien in Ihr Projekt
Ordnen Sie schliesslich die importierten Variablen Ihren EYE+ E/A zu, indem Sie ihnen die richtige Adresse zuweisen, wie dies in TIA in der EYE+ Geräteübersicht angezeigt wird.
In diesem Beispiel beginnen die Inputs bei „%I124.0“ und die Outputs bei „%Q126.0“. Diese Adressen variieren je nach der Position des EYE+ in Ihrem PROFINET-Netzwerk.
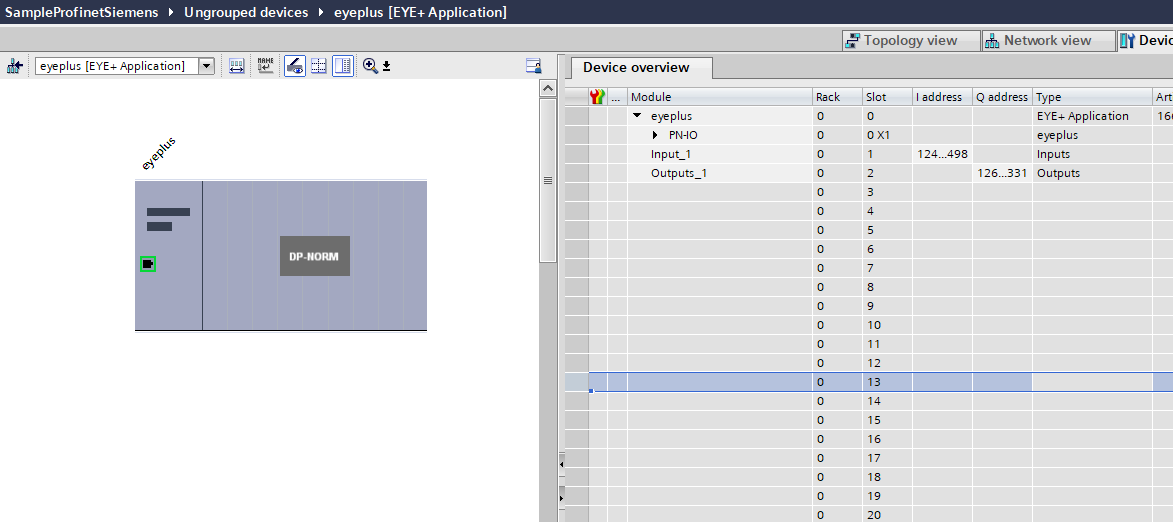
Abb. 284 Notieren Sie die E/A-Adressen Ihres EYE+ Geräts

Abb. 285 Zuordnung der richtigen Adresse zu den importierten Strukturen
Sie können nun die Funktionsblöcke der Bibliothek verwenden. Die Funktionsblöcke sind nur ein Beispiel und ermöglichen die elementare Steuerung des EYE+ Controller, nämlich das Starten einer Produktion und das Abrufen der ersten Teile für ein zuvor auf Ihrem EYE+ Controller erstelltes Rezept. Um dies zu tun, setzen Sie im FB-Beispiel udRecipeID auf die ID dieses Rezepts und dann boStart auf True. Die Koordinaten des gefundenen Teils werden unter reRobotTargetX, reRobotTargetY und reRobotTargetRz gespeichert.