Avertissement
Vous lisez une ancienne version de cette documentation. Si vous souhaitez obtenir des informations actualisées, veuillez consulter 5.4 .6. Conditions de prise
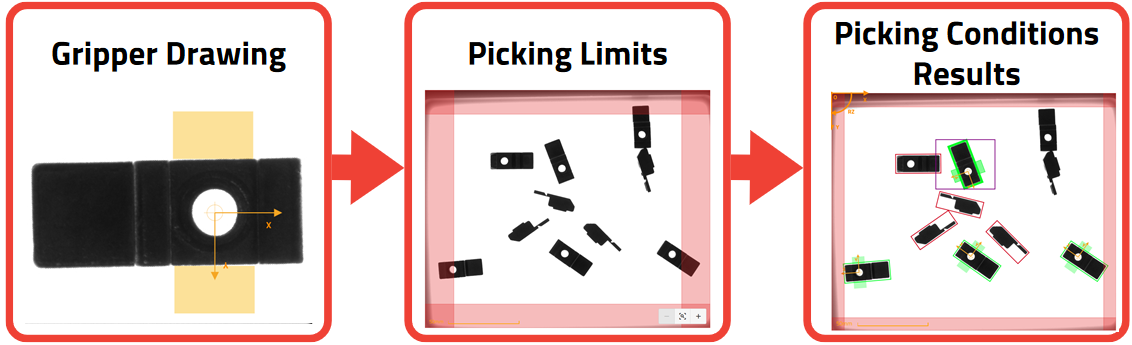
Fig. 107 Aperçu des conditions de prise
Désormais, toutes les informations relatives à la pièce sont connues d’EYE+. Le système sait quelles pièces peuvent être prises par le robot et comment les localiser. Pour éviter toute collision entre le préhenseur et un obstacle (par exemple une autre pièce, la plateforme de production…), nous devons spécifier une zone de dégagement correspondant à la forme du préhenseur autour de la pièce.