Avertissement
Vous lisez une ancienne version de cette documentation. Si vous souhaitez obtenir des informations actualisées, veuillez consulter 5.4 .Qu’est-ce que l’étalonnage main-œil ?
L’enjeu est de trouver la position et l’orientation relatives entre une caméra montée de manière rigide et la dernière articulation du préhenseur du robot. L’objectif de l’étalonnage main-œil est de transposer les coordonnées X,Y des pièces détectées du système de coordonnées de la vision (VCF) vers le système de coordonnées du robot (RCF).
Après l’étalonnage main-œil, EYE+ pourra directement envoyer les coordonnées robot (dans le système de coordonnées du robot) après chaque acquisition d’image.
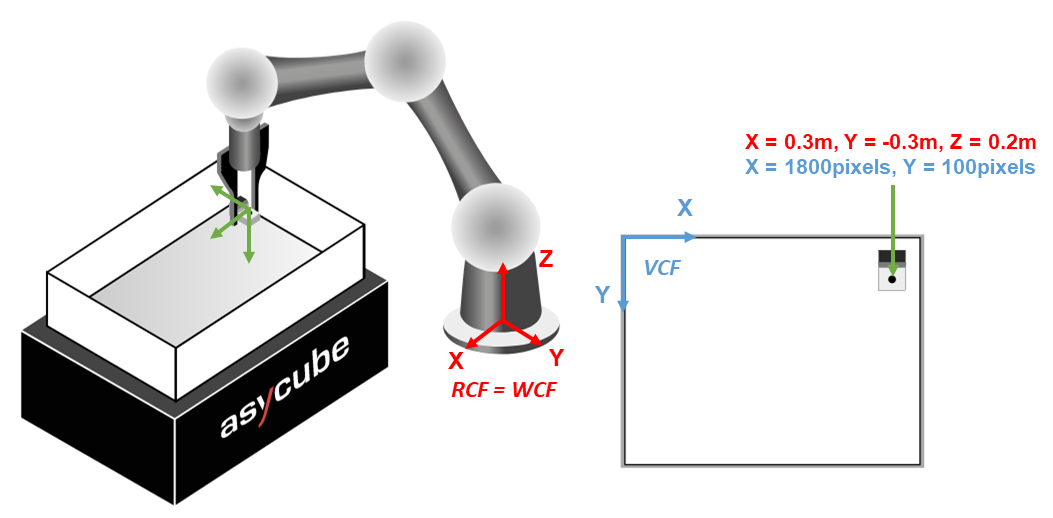
Fig. 222 Représentation de l’étalonnage main-œil ; RCF : système de coordonnées rouge ; VCF : système de coordonnées bleu.
Comment est-ce résolu ?
Le problème mathématique prend la forme d’une transformation affine :
où \(X_r\) sont des coordonnées \((x,y)\) dans le système de coordonnées du robot et \(X_c\) sont des coordonnées \((x,y)\) dans le système de coordonnées de la caméra. Les matrices de transformation \(A\) et \(B\) sont déduites de l’étalonnage main-œil. Grâce à elles, les coordonnées du système du robot peuvent être déduites des coordonnées du système de la vision.
Avertissement
La différence de hauteur entre les deux systèmes de coordonnées n’est pas gérée par EYE+. L’étalonnage main-oeil n’effectue que la transformation des coordonnées des positions \((x,y)\). Votre robot doit être conscient de la différence de hauteur entre son système de coordonnées et la plateforme, ainsi que de la différence de hauteur entre la plateforme et la hauteur de la pièce.
Précision de l’étalonnage
La précision de l’étalonnage affichée à l’étape 6 est la moyenne quadratique de l’erreur de reprojection des quatre points. Les reprojections sont les transformations inverses des 4 points du robot projetés dans le système de coordonnées de la vision.
Plus la valeur de la précision de l’étalonnage est faible, plus l’étalonnage est bon.