Avertissement
Vous lisez une ancienne version de cette documentation. Si vous souhaitez obtenir des informations actualisées, veuillez consulter 5.4 .3. Résultats
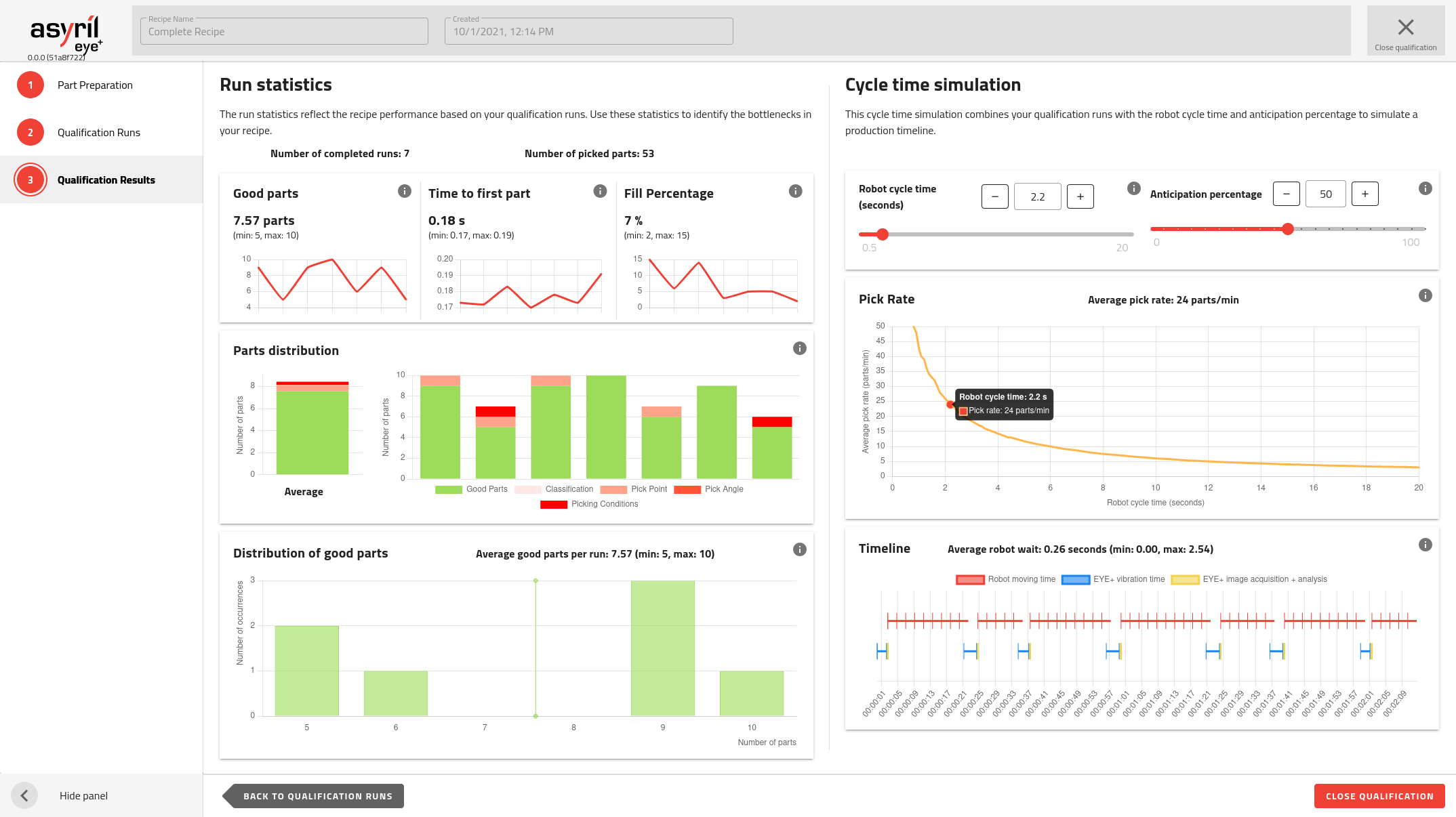
Fig. 138 Résultats de la qualification
Cette page utilise toutes les informations collectées et les affiche sous la forme d’un résumé de tous les cycles que vous avez exécutés à l’étape précédente. Elle vous permet ensuite d’ajuster certains paramètres afin de simuler des cycles de production.
Remarque
La toute première acquisition d’image ainsi que la première vibration ne sont pas prises en compte dans le calcul.
Statistiques des cycles
Les statistiques des cycles reflètent les performances de la recette sur la base des cycles de qualification.
Conseil
Ces statistiques sont très utiles pour identifier les goulots d’étranglement dans la recette.
Conseil
Vous pouvez ajouter d’autres cycles en revenant à l’étape précédente (toutes les données précédentes sont conservées).
Bonnes pièces

Fig. 139 Statistiques des cycles - Nombre de bonnes pièces
Le graphique affiche l’évolution du nombre de bonnes pièces détectées sur l’ensemble des cycles.
La valeur moyenne de cet indicateur sur tous les cycles de qualification est affichée, ainsi que sa valeur minimale et maximale (entre parenthèses).
Conseil
Lorsqu’aucune bonne pièce n’est trouvée, une séquence de vibrations supplémentaire est nécessaire. Cela a un impact critique sur le temps d’attente du robot.
Temps jusqu’à la première pièce
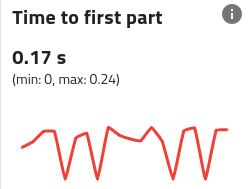
Fig. 140 Statistiques des cycles - Temps jusqu’à la première pièce
Le graphique montre l’évolution du temps que le système a mis à trouver la première bonne pièce sur l’ensemble des cycles de qualification.
La valeur moyenne de cet indicateur sur tous les cycles de qualification est affichée, ainsi que sa valeur minimale et maximale (entre parenthèses).
Remarque
Cet indicateur reflète directement le degré d’optimisation de votre recette de vision.
Conseil
Pour l’améliorer, envisagez de réduire le nombre de mauvaises pièces atteignant l’étape de sélection des candidats et de masquer toutes les caractéristiques inutiles lors des étapes d’apprentissage du point de prise et de l’angle de prise.
Pourcentage de remplissage
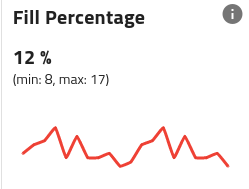
Fig. 141 Statistiques des cycles - Pourcentage de remplissage
Le graphique montre l’évolution du pourcentage de remplissage mesuré par l’analyse d’image sur tous les cycles de qualification.
La valeur moyenne de cet indicateur sur tous les cycles de qualification est affichée, ainsi que sa valeur minimale et maximale (entre parenthèses).
Répartition des pièces
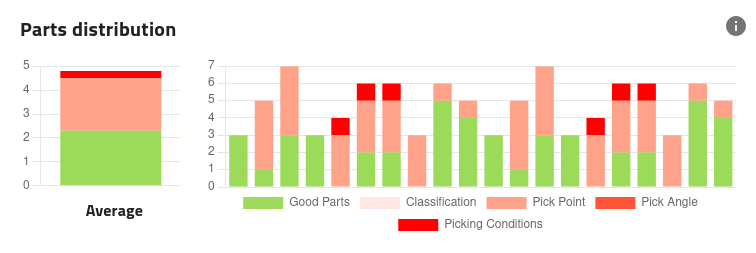
Fig. 142 Statistiques des cycles - Répartition des pièces
Le graphique à droite affiche la répartition des pièces entre pièces acceptées et rejetées pour chaque qualification.
Le graphique de gauche montre la répartition moyenne sur l’ensemble des cycles de qualification.
Conseil
Utilisez ces graphiques pour déterminer quelle étape de la recette pourrait être améliorée.
Répartition des bonnes pièces
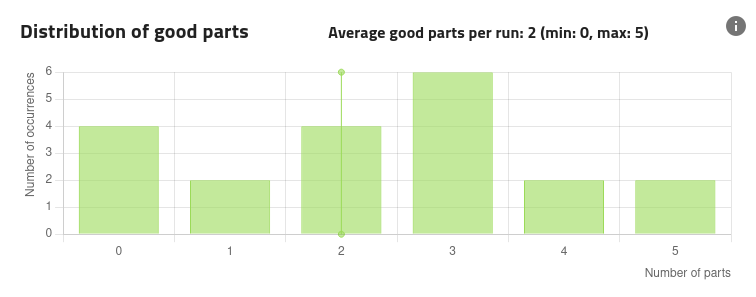
Fig. 143 Statistiques des cycles - Répartition des bonnes pièces.
Le graphique affiche la répartition du nombre de bonnes pièces mesuré durant les cycles de qualification.
Répartition du temps jusqu’à le première pièce
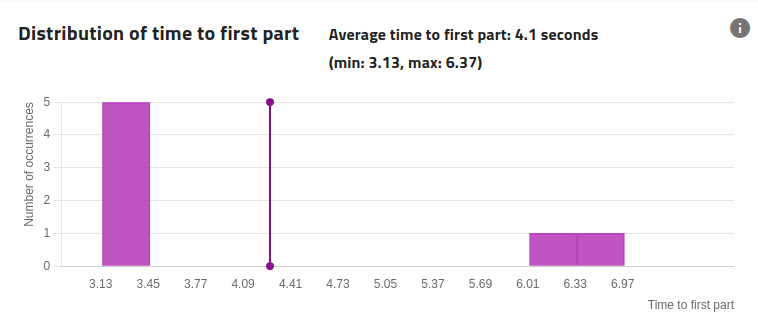
Fig. 144 Statistiques des cycles - Répartition du temps jusqu’à la première pièce.
Ce graphique affiche la répartition du temps écoulé jusqu’à la détection de la première pièce durant les cycles de qualification.
Remarque
Si la séquence de vibrations est plus longue que la durée du cycle du robot, ce dernier attendra entre chaque séquence de vibrations. Le nombre moyen de bonnes pièces par cycle donne une indication sur la fréquence de cette attente.
Conseil
Lorsqu’aucune bonne pièce n’est trouvée, une séquence de vibrations supplémentaire est nécessaire. Cela a un impact critique sur le temps d’attente du robot.
Simulation de la durée de cycle
Cette section combine les cycles de qualification avec la durée de cycle et le pourcentage d’anticipation théoriques du robot pour simuler une timeline de production.
Utilisez-la pour évaluer l’impact de la séquence de vibrations et de l’analyse d’images sur le timing der votre production.
Durée de cycle du robot
Afin de calculer la simulation, la durée de cycle du robot doit être saisie. Cette valeur peut être modifiée pour examiner l’impact sur le taux de prise et l’attente du robot.
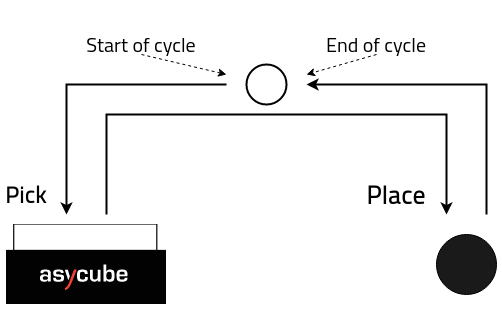
Fig. 145 Illustration du cycle de prélèvement et de placement du robot
Pourcentage d’anticipation
Le pourcentage d’anticipation est également lié au robot. Il représente la part en pourcentage de la durée du cycle du robot durant laquelle EYE+ est autorisé à vibrer/acquérir une image pour améliorer les performances en travaillant alors que le robot est encore en mouvement. Comme son nom l’indique, ce pourcentage se réfère aux X derniers % de la durée du cycle du robot, où X est le pourcentage d’anticipation. Par exemple, si vous définissez cette valeur à 20% avec une durée de cycle de 1000 ms, EYE+ pourra vibrer/acquérir une image après 800 ms (les derniers 20%).
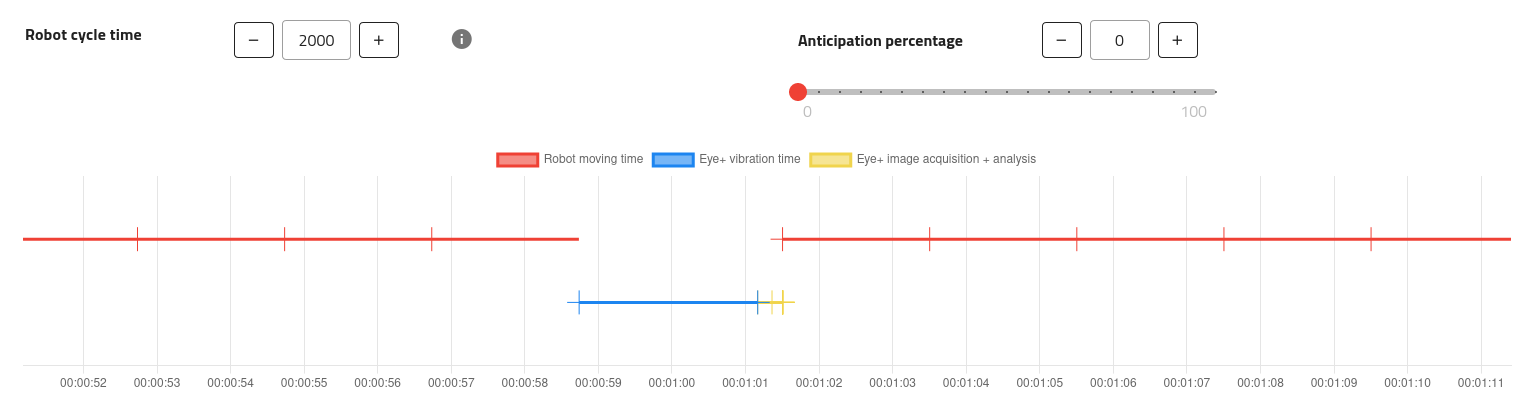
Fig. 146 Chronologie avec 0% d’anticipation
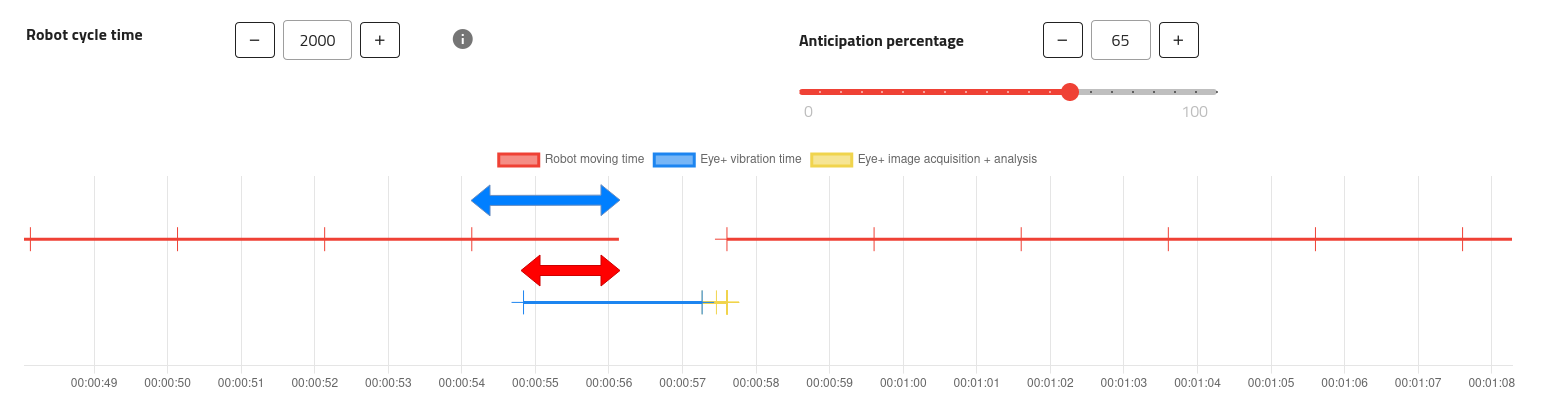
Fig. 147 Chronologie avec 65% d’anticipation
Dans l’exemple présenté ci-dessus, comme un pourcentage d’anticipation de 65% a été choisi, la flèche rouge représente exactement 65% de la flèche bleue (1300ms vs 2000ms).
Remarque
Une modification ce pourcentage après avoir effectué un seul cycle ne produit aucune différence dans les données, car il n’y aura pas de vibration suivante à anticiper.
Taux de prise
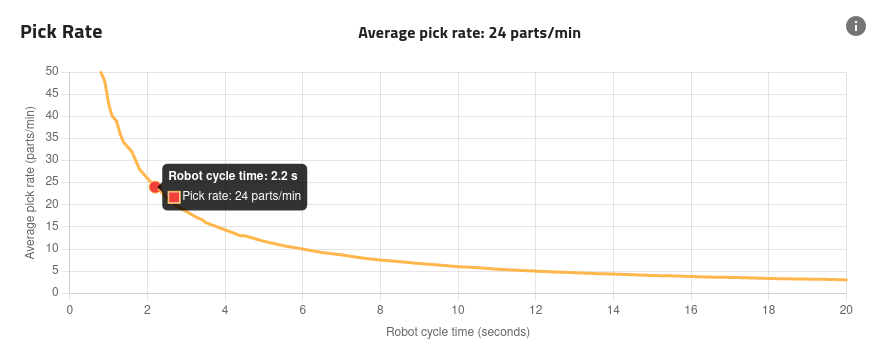
Fig. 148 Simulation de la durée de cycle - Taux de prise
Le taux de prise est calculé à partir des données des cycles de qualification et varie lorsque le pourcentage d’anticipation est modifié.
À partir de ce graphique, vous pouvez déterminer la durée du cycle du robot nécessaire pour atteindre le taux de prise souhaité.
Chronologie
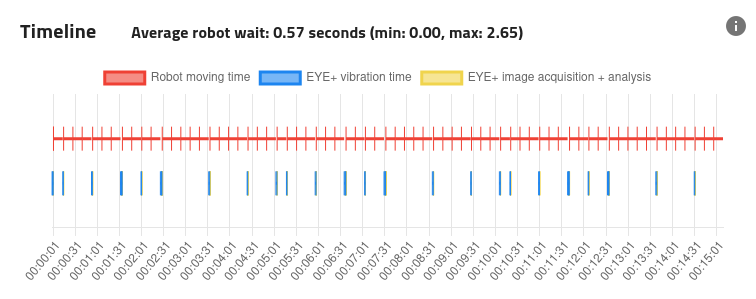
Fig. 149 Simulation de la durée de cycle - Chronologie
La chronologie présente deux séries différentes, celle du haut représente le robot, tandis que celle du bas représente la partie EYE+. La ligne du robot indique quand celui-ci reçoit une réponse à une commande get_part par une barre verticale. Chaque barre sur la même ligne continue est séparée par la valeur de la durée du cycle du robot que vous pouvez définir à l’aide du champ dédié.
La ligne EYE+ indique quand l’Asycube connecté a exécuté une séquence de vibrations, la durée de cette séquence ainsi que tous les événements de la vision, y compris l’acquisition d’une image ou quand les coordonnées d’une bonne pièce étaient prêtes à être transmises au robot à l’aide de la commande get_part.
Conseil
Vous pouvez afficher un panoramique ou zoomer dans la chronologie en utilisant votre souris pour vous concentrer sur des points spécifiques dans le temps.