Avertissement
Vous lisez une ancienne version de cette documentation. Si vous souhaitez obtenir des informations actualisées, veuillez consulter 5.4 .Alternance du modèle de pièces
Première option
Le paramètre model_quantity est utilisé pour demander à EYE+ de rechercher une ou plusieurs pièces d’un modèle spécifique, soit 1 ou 2. Cela signifie que chaque fois qu’EYE+ génère une image, il cherchera au moins <n> pièces du (ou des) modèle(s) spécifié(s) sur l’image. S’il ne trouve pas ces pièces, aucune coordonnée ne sera envoyée. Une nouvelle vibration et une nouvelle acquisition d’image seront effectuées jusqu’à ce que ces <n> pièces soient obtenues.
Ce paramètre influence le fonctionnement des commandes get_part et prepare_part.
Le scénario suivant décrit comment obtenir une pièce du modèle 1, puis une pièce du modèle 2 et ainsi de suite, toujours en alternance.
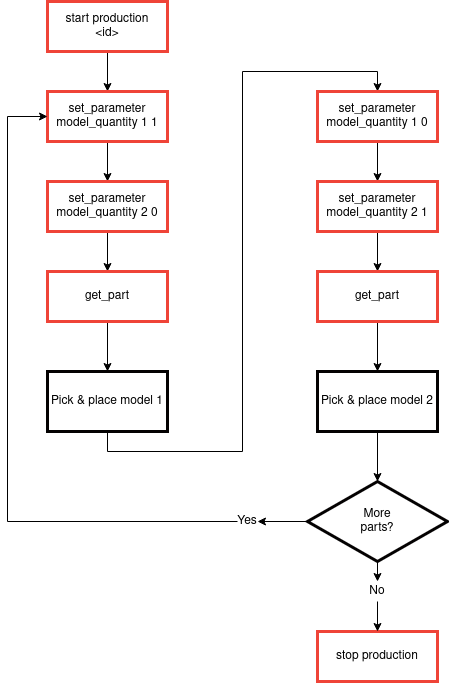
Fig. 251 Scénario de production avec alternance des modèles de pièces
[set_parameter model_quantity 1 1]: Attribuez la valeur 1 au paramètre model_quantity pour le modèle
1.[set_parameter model_quantity 2 0]: Attribuez la valeur 0 au paramètre model_quantity pour le modèle
2.[get_part]: Appelez la commande get_part, elle fera vibrer l’Asycube et générera une image ou enverra directement les coordonnées d’une pièce du modèle
1. La vibration de l’Asycube et l’analyse de l’image ne s’arrêteront pas avant qu’une ou plus de pièces du modèle1aient été trouvées pour répondre à la demande. Comme model_quantity pour le modèle2est défini comme étant égal à 0, aucune pièce du modèle2ne sera rendue ici.[Prélever et placer la pièce 1]: Prélevez et placez la pièce du modèle
1.[set_parameter model_quantity 1 0]: Attribuez la valeur 0 au paramètre model_quantity pour le modèle
1.[set_parameter model_quantity 2 1]: Attribuez la valeur 1 au paramètre model_quantity pour le modèle
2.[get_part]: Appelez la commande get_part, elle fera vibrer l’Asycube et générera une image ou enverra directement les coordonnées d’une pièce du modèle
2. La vibration de l’Asycube et l’analyse de l’image ne s’arrêteront pas avant qu’une ou plus de pièces du modèle2aient été trouvées pour répondre à la demande. Comme model_quantity pour le modèle1est maintenant défini comme étant égal à 0, aucune pièce1ne sera jamais rendue ici.[Prélever et placer la pièce 2]: Prélevez et placez la pièce du modèle
2.Recommencez à partir de l’étape 1. Le cycle s’arrête lorsqu’EYE+ reçoit la commande stop production.
Deuxième option
Le scénario suivant n’est pas à proprement parler équivalent à la première option décrite ci-dessus, mais il pourrait être utilisé pour obtenir un résultat similaire. Au lieu de demander alternativement une pièce du modèle 1 et une pièce du modèle 2, nous demandons maintenant à la fois une pièce du modèle 1 et une pièce du modèle 2. Ici, le système s’assurera que get_part renvoie les deux pièces dans la même réponse. Cela signifie qu’au moins une pièce de chaque modèle doit pouvoir être prise en même temps.
Cela peut être utile si le robot a, par exemple, deux pinces et doit prendre à la fois un pièce du modèle 1 et une pièce du modèle 2 pour continuer son opération.
Le fait d’exiger que des pièces des modèles 1 et 2 puissent être prélevées en même temps réduit la probabilité que get_part puisse être exécuté après une séquence d’alimentation et peut donc augmenter la durée de cycle de l’application.
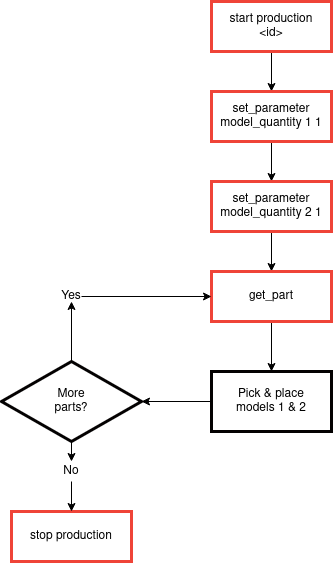
Fig. 252 Scénario de production pour toujours obtenir une pièce du modèle 1 et un pièce du modèle 2
[set_parameter model_quantity 1 1]: Attribuez la valeur 1 au paramètre model_quantity pour le modèle
1.[set_parameter model_quantity 2 1]: Attribuez la valeur 1 au paramètre model_quantity pour le modèle
2.[get_part]: Appelez la commande get_part, elle fera vibrer l’Asycube et générera une image ou enverra directement les coordonnées d’une pièce du modèle
1et d’une pièce du modèle2. La vibration de l’Asycube et l’analyse de l’image ne s’arrêteront pas avant qu’une ou plus de pièces des deux modèles aient été trouvées.[Prélever et placer les pièces 1 & 2]: Prélevez et placez la pièce du modèle
1et la pièce du modèle2.Recommencez à partir de l’étape 1. Le cycle s’arrête lorsqu’EYE+ reçoit la commande stop production.