Avertissement
Vous lisez une ancienne version de cette documentation. Si vous souhaitez obtenir des informations actualisées, veuillez consulter 5.4 .Utilisation de quatre images
Ici est présenté le scénario utilisé dans l’assistant d’étalonnage main-œil d’EYE+. Dans ce scénario, EYE+ devrait détecter une seule pièce par image. Pour chaque pièce détectée, vous devez associer une position robot. Une fois ce scénario terminé, vous obtiendrez les coordonnées de la pièce directement dans le système de coordonnées du robot pendant la production.
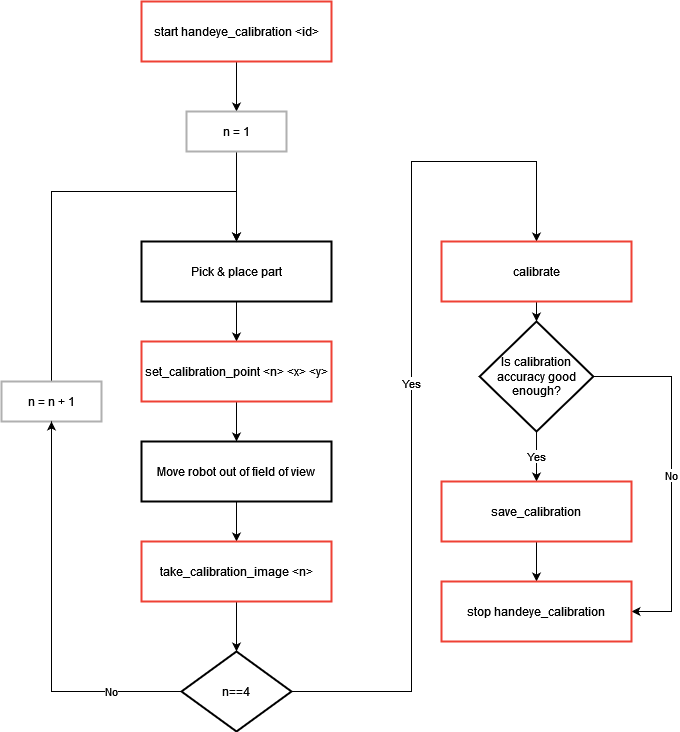
Fig. 215 Étalonnage main-œil en utilisant quatre images
[start handeye_calibration <id>] : Démarrez l’état d’étalonnage main-œil en utilisant l’identifiant de recette
<id>voulu.
Démarrez une boucle de quatre itérations
[Prélever & placer la pièce] : Prélevez une pièce et placez-la sur la plateforme de l’Asycube. Lorsque vous prélevez la pièce, assurez-vous que vous la prélevez au point de prise défini dans la recette sélectionnée. La pièce doit être placée de telle sorte qu’elle puisse être détectée par EYE+ lors de l’analyse d’image suivante. Une bonne pratique consiste à placer la pièce aussi près que possible d’un coin de l’Asycube et dans un coin différent à chaque itération.
[set_calibration_point <n> <x> <y>] : Une fois que vous avez placé la pièce, relevez les coordonnées réelles du robot et envoyez-les à EYE+ en utilisant la commande set_calibration_point avec le numéro de point
<n>correspondant.[Déplacer le robot hors du champ de vue] : Déplacez le robot hors du champ de vue sans faire bouger la pièce.
[take_calibration_image <n>] : Appelez la commande take_calibration_image avec le même numéro
<n>que celui utilisé pour la commande set_calibration_point précédente.
Une fois que la boucle est terminée
[calibrate] : Appelez la commande calibrate et vérifiez si la précision de l’étalonnage
calibration_accuracyest suffisamment bonne pour votre scénario de production. Si ce n’est pas le cas, vous devez probablement vérifier les éléments suivants :L’outil de votre robot est-il correctement défini ?
Avez-vous prélevé la pièce correctement ?
Votre recette est-elle suffisamment précise ?
La pièce a-t-elle bougé pendant le scénario ?
Remarque
La définition d’une bonne précision d’étalonnage dépend de vos besoins. Dans la plupart des applications, une précision d’étalonnage de moins d’un millimètre est suffisante.
S’il arrive trop souvent que vous ne parvenez pas à prélever votre pièce durant la production, cela signifie que votre étalonnage n’est pas assez précis et que vous devez en effectuer un nouveau. Veuillez consulter la section Comment puis-je augmenter la précision de l’étalonnage main-œil ? pour plus d’informations.
Remarque
Vous pouvez tester l’étalonnage à l’aide de la commande test_calibration.
[save_calibration] : Sauvegardez l’étalonnage main-œil à l’aide de la commande save_calibration.
[stop handeye_calibration] : Pour arrêter l’état d’étalonnage main-œil, appelez la commande stop handeye_calibration.