Avertissement
Vous lisez une ancienne version de cette documentation. Si vous souhaitez obtenir des informations actualisées, veuillez consulter 5.4 .1.1 Répartition des pièces
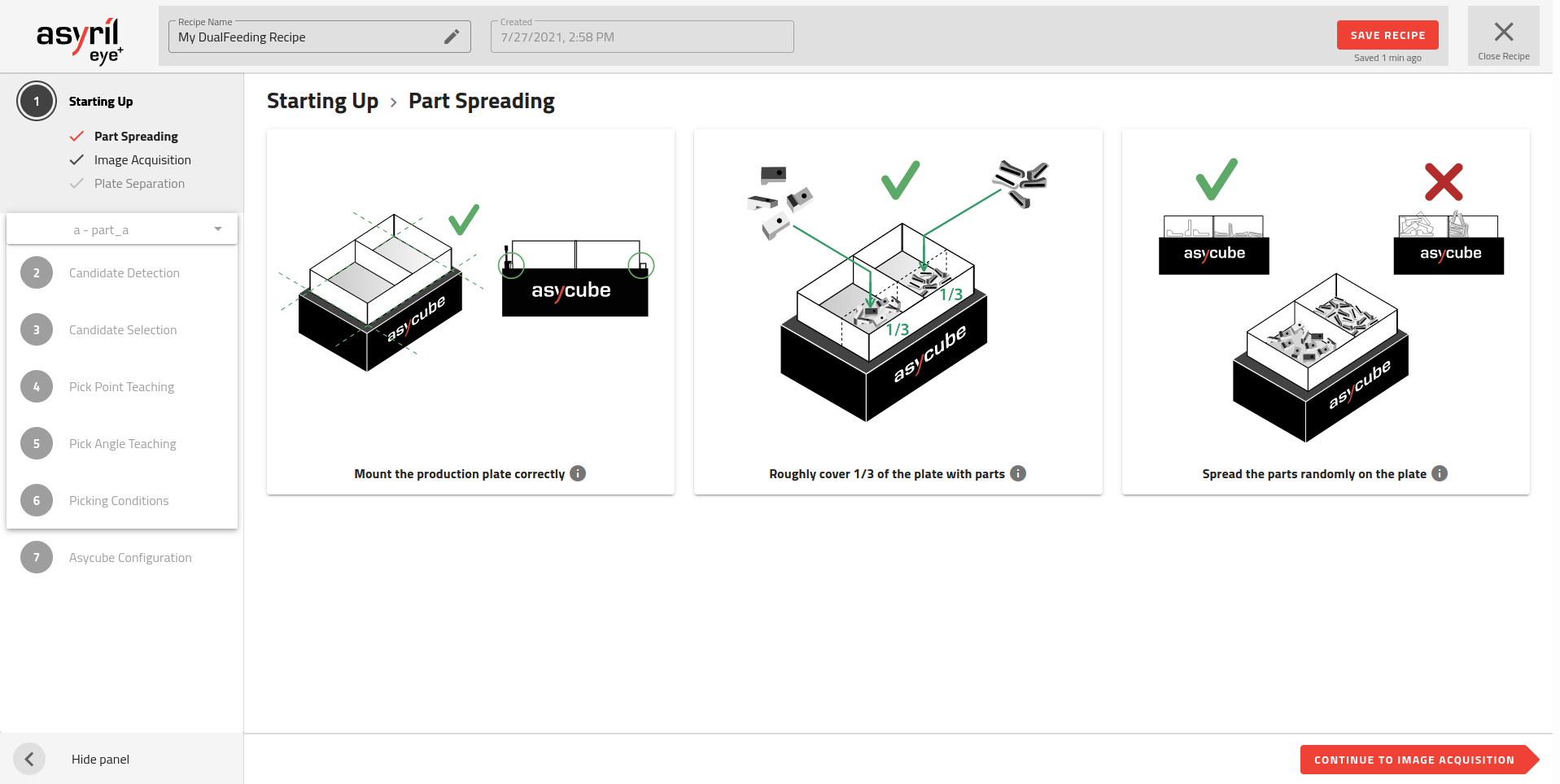
Fig. 237 Démarrage - Répartition des pièces
Avant de commencer, assurez-vous que la plateforme de production dualfeeding de l’Asycube est correctement montée.
Ensuite, placez un nombre raisonnable des différentes pièces uniformément réparties sur leur partie respective de la plateforme de production. Une règle générale pour trouver le nombre approprié de pièces est de recouvrir 1/3 de chaque côté de la plateforme de pièces.
Répartissez les pièces au hasard mais assurez-vous que toutes les orientations possibles des pièces sont représentées :
Bonne orientation : L’orientation requise pour que la pièce puisse être prise par le robot.
Mauvaise orientation : Toutes les autres orientations de la pièce qui ne sont pas adaptées à la prise par le robot.
Conseil
Laissez certaines pièces se toucher (un groupe de 2 pièces est suffisant). Cela permettra de garantir que les groupes de pièces soient rejetés lors de la phase de détection des candidats.
1.2 Acquisition d’images
Cette étape est exactement la même que pour une recette à pièce unique. Pour plus d’informations, veuillez consulter la section 1.2 Acquisition d’images.