警告
現在、このドキュメントは古いバージョンをご覧いただいています。 最新の情報をご希望の場合は、下記をご参照してください 5.4 .ハンドアイ校正について
ここでの課題は、固定して取り付けられたカメラとグリッパーの付いたロボットの最終の関節位置との間の相対的な位置と方向を求めることです。ハンドアイ校正の目的は、検出された部品のX とY 座標をビジョン座標系(VCF)からロボット座標系(RCF)に変換することです。
ハンドアイ校正後、 EYE+ は画像取得後にロボット座標(ロボット座標系内)を直接送信することができるようになります。
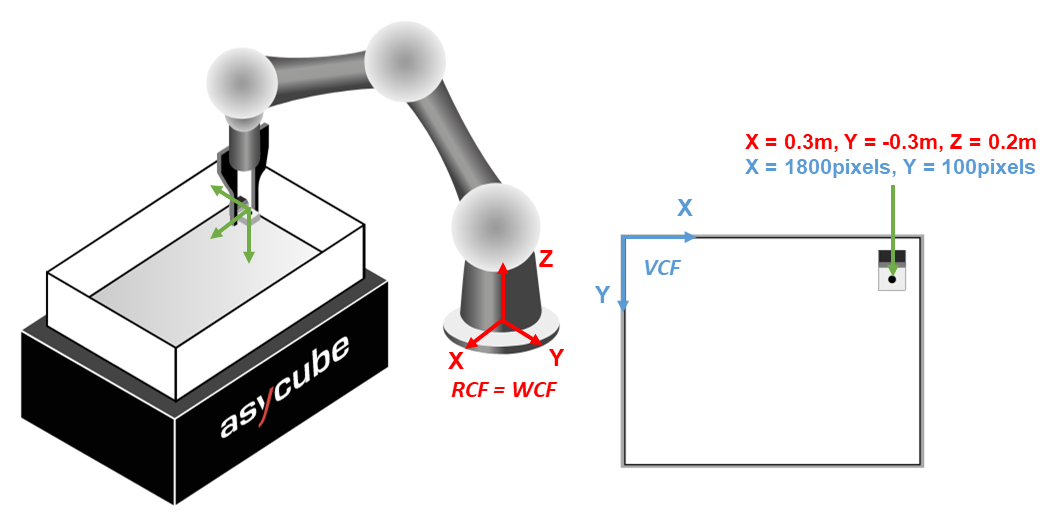
図 260 ハンドアイ校正の表現は、 RCF :赤色の座標系; VCF :青色の座標系。
どのように解決する?
数学的には、アフィン変換の形をしています。
\[X_r = A X_C + B\]
ここで、 \(X_r\) はロボット座標系における \((x,y)\) の座標であり、 \(X_c\) はカメラ座標系における \((x,y)\) の座標である変換行列 \(A\) と \(B\) は,ハンドアイ校正から推論されます。これらによって、ロボット座標系内の座標は、ビジョンシステム内の座標から推測することができます。
重要
2つの座標系の高さの違いは、 EYE+ では処理されません。ハンドアイ校正では、 \((x,y)\) の位置の座標変換のみを行っています。ロボットは自分の座標系とプレートの間の高さの違いや、プレートと部品の高さの違いをハンドアイ校正とは別に、認識していなければなりません。
校正精度
ステップ6で表示される校正精度は、4点の再投影誤差の二乗平均平方根です。再投影は、ビジョン座標系に投影された4点のロボット座標系の逆変換です。
校正精度の値が小さければ小さいほど、校正は良好です。