Warnung
Sie lesen eine alte Version dieser Dokumentation. Wenn Sie aktuelle Informationen wünschen, schauen Sie bitte unter 5.4 .6.3 Ergebnisse
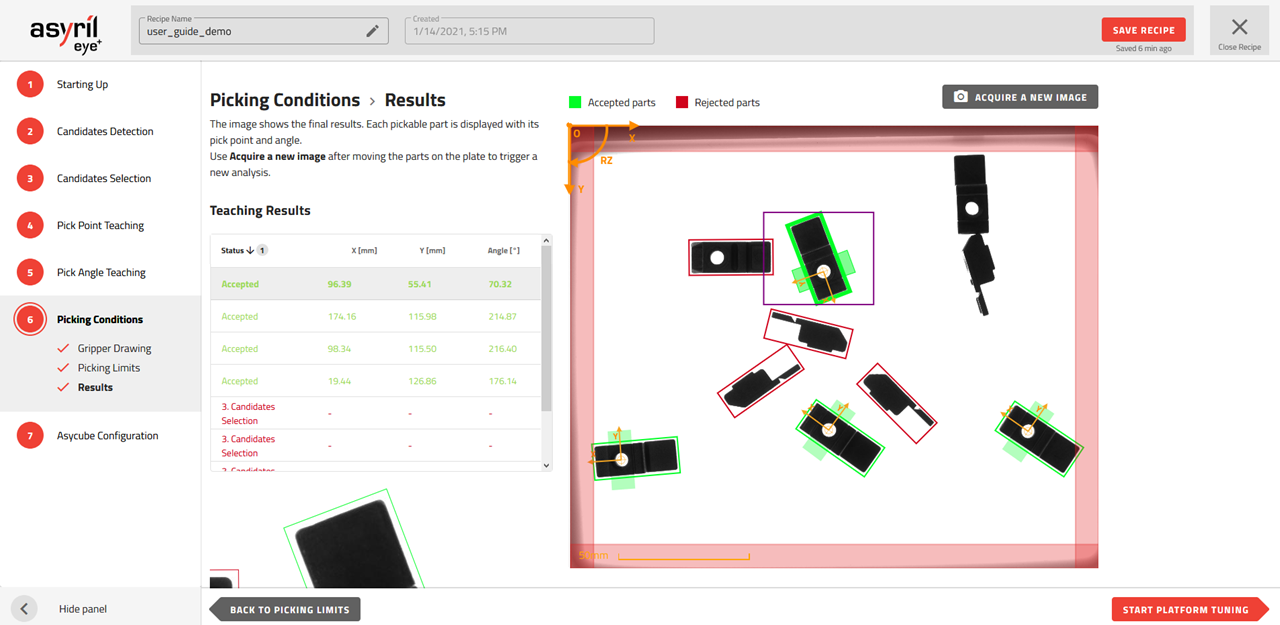
Abb. 113 Entnahmebedingungen - Ergebnisse
Aus diesem Schritt resultieren alle endgültig entnehmbaren Teile. Die Koordinaten der Teile in Grün werden an den Roboter gesendet, wenn ein get_part Befehl ausgeführt wird.
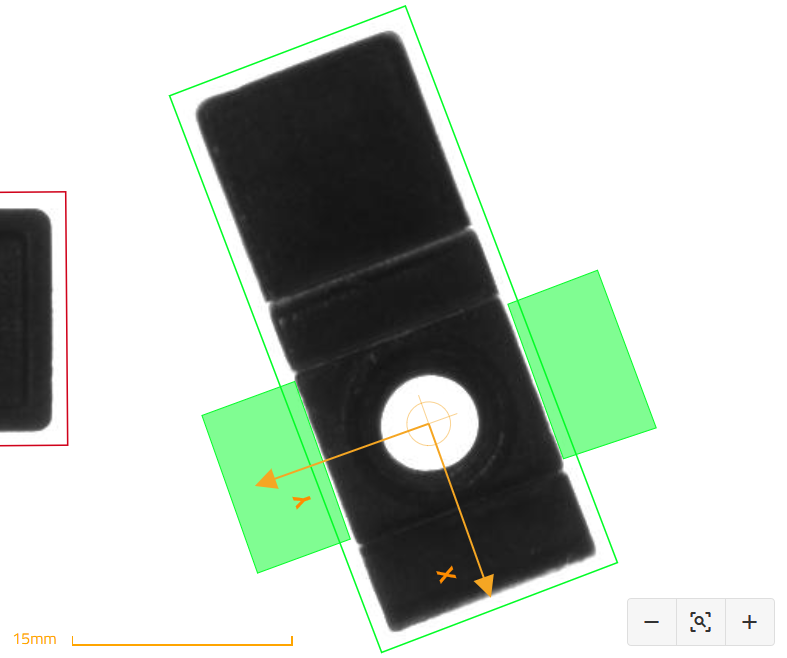
Abb. 114 Entnahmebedingungen - Ergebnisse, Zoom auf ein Teil
Alle Teile in Rot sind für die Entnahme abgelehnte Teile. Die Tabelle zeigt den Ablehnungs-Status aller Teile, d. h. in welcher Phase die Teile abgelehnt wurden:
Kandidatenauswahl: Das Teil falsch ist ausgerichtet.
Entnahmepunkt: Der Entnahmepunkt konnte nicht mit einem Prozentwert, der höher ist als der festgelegte Schwellenwert, auf dem Teil positioniert werden.
Entnahmewinkel: Der Entnahmewinkel konnte nicht mit einem Prozentwert, der höher ist als der festgelegte Schwellenwert, auf dem Teil positioniert werden.
Entnahmebedingungen: Der Greifer-Freiraum des Teils ist mit einem Objekt oder den Entnahmegrenzen in Kontakt.
Bemerkung
Wenn ein Teil nicht von einem grünen oder roten Rechteck umgeben ist, bedeutet dies, dass es bereits durch den Schritt der Kandidatenerkennung herausgefiltert wurde. In diesem Fall können Sie die Parameter dieses Schritts ändern.