Warnung
Sie lesen eine alte Version dieser Dokumentation. Wenn Sie aktuelle Informationen wünschen, schauen Sie bitte unter 5.4 .Verwendung von vier Bildern
Hier wird das Szenario vorgestellt, das in EYE+ im Hand-Augen Kalibrierungsassistenten verwendet wird. In diesem Szenario sollte EYE+ nur ein Teil pro Bild erkennen und jedem erkannten Teil sollte eine Roboterposition zugeordnet werden. Sobald dieses Szenario abgeschlossen ist, erhalten Sie die Koordinaten des Teils während der Produktion direkt im Koordinatensystem des Roboters.
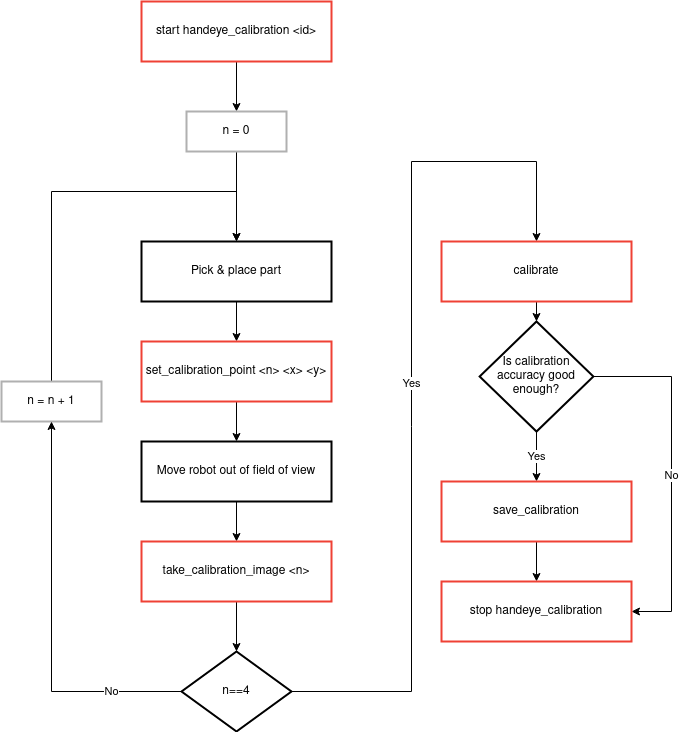
Abb. 210 Hand-Augen Kalibrierung mit vier Bildern
[start handeye_calibration <id>]: Starten Sie den Hand-Augen Kalibrierungsstatus mit dem korrekten Rezeptidentifikator
<id>.
Starten Sie einen Loop mit vier Iterationen
[Teil entnehmen & platzieren]: Entnehmen Sie ein Teil und platzieren Sie es auf der Platte des Asycubes. Achten Sie bei der Entnahme des Teils darauf, dass Sie es an dem im ausgewählten Rezept definierten Entnahmepunkt entnehmen. Das Teil muss so platziert werden, dass es von EYE+ bei der nächsten Bildanalyse erkannt werden kann. Eine gute Praxis besteht darin, das Teil so nahe wie möglich an einer Ecke des Asycubes und bei jeder Iteration in eine andere Ecke zu platzieren.
[set_calibration_point <n> <x> <y>]: Nachdem Sie das Teil platziert haben, ermitteln Sie die aktuellen Roboterkoordinaten und senden Sie sie mit dem Befehl set_calibration_point mit der korrekten Punktnummer
<n>an EYE+.[Roboter aus dem Sichtfeld bewegen]: Bewegen Sie den Roboter aus dem Sichtfeld, ohne dabei das Teil zu bewegen.
[take_calibration_image <n>]: Führen Sie den Befehl take_calibration_image mit der gleichen Nummer
<n>aus, die für den vorherigen Befehl set_calibration_point verwendet wurde.
Nach Abschluss des Loops
[calibrate]: Rufen Sie den Befehl calibrate auf und überprüfen Sie, ob die Genauigkeit der Kalibrierung
calibration_accuracyfür Ihr Produktionsszenario gut genug ist. Wenn dies nicht der Fall ist, sollten Sie wahrscheinlich folgende Punkte überprüfen:Ist das Werkzeug Ihres Roboters richtig definiert?
Haben Sie das Teil richtig entnommen?
Ist Ihr Rezept genau genug?
Hat sich das Teil während des Szenarios bewegt?
Bemerkung
Die Definition, ab wann die Genauigkeit der Kalibrierung gut ist, hängt von Ihren Anforderungen ab. Für die meisten Anwendungen ist eine Genauigkeit von weniger als einem Millimeter ausreichend.
Wenn Sie Ihr Teil während der Produktion zu oft nicht entnehmen können, bedeutet dies, dass Ihre Kalibrierung nicht genau genug ist und Sie eine neue Kalibrierung vornehmen müssen. Weitere Informationen finden Sie im Abschnitt Wie kann ich die Genauigkeit der Hand-Augen Kalibrierung verbessern?.
Bemerkung
Sie können die Kalibrierung anhand des Befehls test_calibration testen.
[save_calibration]: Speichern Sie die Hand-Augen Kalibrierung mit dem Befehl save_calibration.
[stop handeye_calibration]: Führen Sie den Befehl stop handeye_calibration aus, um den Hand-Augen Kalibrierungsstatus zu beenden.