Warnung
Sie lesen eine alte Version dieser Dokumentation. Wenn Sie aktuelle Informationen wünschen, schauen Sie bitte unter 5.4 .Image after send
Der Parameter image_after_send wird verwendet, um vor jedem get_part oder prepare_part ein force_take_image zu automatisieren.
Bemerkung
Das Szenario in Abb. 213 hat ein beinahe gleiches Verhalten wie das rechte Szenario in Abb. 211.
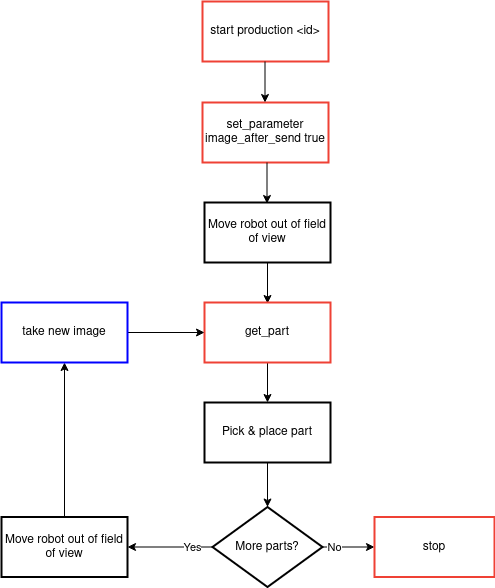
Abb. 213 image_after_send Szenario
[set_parameter image_after_send true]: Setzen Sie den Parameter image_after_send auf true.
[Roboter aus dem Sichtfeld bewegen]: Bevor Sie den Befehl get_part ausführen, müssen Sie sicherstellen, dass nichts die Sicht der Kamera verdeckt.
[get_part]: Führen Sie den Befehl get_part aus, dies wird entweder den Asycube vibrieren lassen und ein Bild aufnehmen, oder Ihnen direkt die Koordinaten eines Teils senden.
[Teil entnehmen & platzieren]: Das Teil wird entnommen und platziert. Beim Entnehmen oder Platzieren eines Teils, oder während der Roboter bewegt wird, berührt der Roboter den Asycube und bewegt die übrigen Teile.
[Roboter aus dem Sichtfeld bewegen]: Bevor Sie den Befehl get_part ausführen, müssen Sie sicherstellen, dass nichts die Sicht der Kamera verdeckt.
[Neues Bild aufnehmen]: EYE+ nimmt vor dem Befehl get_part automatisch ein neues Bild auf, wenn der Parameter image_after_send auf true gesetzt ist. Somit wird sichergestellt, dass die Koordinaten der Teile korrekt sind.
Beginnen Sie von neuem bei Schritt 1. Der Zyklus stoppt, wenn EYE+ den Befehl stop production erhält.