Warnung
Sie lesen eine alte Version dieser Dokumentation. Wenn Sie aktuelle Informationen wünschen, schauen Sie bitte unter 5.4 .Hand-Augen Kalibrierung - Gute Praktiken
Roboterkoordinatensystem (RCF)
Das Koordinatensystem des Roboters kann sich an beliebiger Stelle befinden ohne die Genauigkeit der Hand-Augen Kalibrierung zu beeinträchtigen. Wir raten Ihnen jedoch, Folgendes zu beachten:
Koordinatensystem des Roboters auf der gleichen Ebene wie der Asycube: Platzieren Sie den Z=0 des Koordinatensystems des Roboters auf der gleichen Ebene wie die Asycube-Platte.
Die Positionierung des Roboters zur Entnahme eines Teils ergibt sich somit nur aus den von EYE+ gelieferten Koordinaten \((x,y)\) und der Entnahmehöhe des Teils \(z\) für Ihre Roboteranwendung.
Die Platzierung des Roboterkoordinatensystems auf der Asycube-Platte garantiert die Gültigkeit der manuell hinzugefügten \(z\)-Koordinaten. Wenn stattdessen das Weltkoordinatensystem verwendet wird, ist die Asycube-Platte möglicherweise nicht perfekt parallel zur Basis des Roboters. Dies bedeutet, dass die \(z\)-Koordinate von den \((x,y)\)-Koordinaten abhängig sein kann.
Ursprung des Roboterkoordinatensystems in einer der vier Ecken des Asycubes: Die von EYE+ gesendeten Koordinaten sind leichter zu visualisieren, wenn der Ursprung in einer Ecke liegt (Abb. 236).
Werkzeug-Mittelpunkt (Tool center point TCP)
Das Koordinatensystem wird zur Unterstützung der Bewegung des Roboters im Raum verwendet. Ohne Werkzeug oder Greifer am Roboter wird das Ende des Arms als Referenzpunkt für die Bewegungssteuerung verwendet (TCP am letzten Gelenk des Roboters).
Der Controller kann jedes der Robotergelenke gleichzeitig bewegen, um den Referenzpunkt im Raum an die gewünschten Positionen zu bewegen. Wenn Sie am Roboterarm ein Werkzeug oder einen Greifer hinzufügen, muss der Referenzpunkt geändert werden, um den durch das Werkzeug verursachten Offset widerzuspiegeln. Ein Werkzeug-Mittelpunkt oder TCP wird verwendet, um den erforderlichen Offset zu erzeugen. Dadurch kann der Controller das Koordinatensystem so verschieben, dass es dem Werkzeug und nicht dem Ende des Arms folgt.
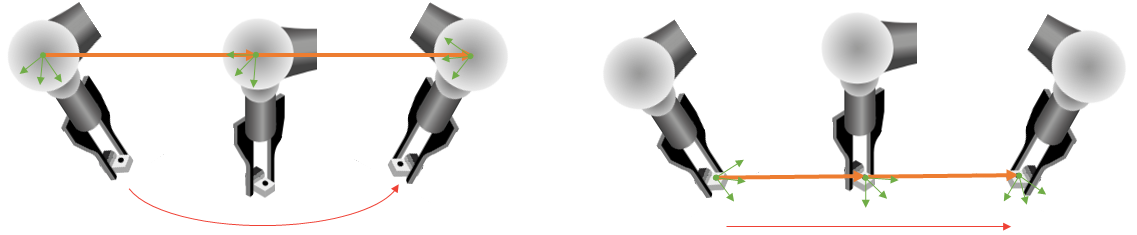
Abb. 235 links: TCP am letzten Robotergelenk; rechts: TCP mit dem Werkzeug-Offset
Werkzeug-Koordinatensystem (Tool coordinate frame TCF)
Das Koordinatensystem des Werkzeugs (TCF) wird auf dem Werkzeug-Mittelpunkt (Tool center point TCP) positioniert. Normalerweise ist der Z-Vektor des TCF dem letzten Gelenk des Roboters oder dem Roboterwerkzeug entgegengesetzt ausgerichtet. Die TCP-Position entspricht der Position, an der Sie das Teil greifen wollen.
Einige TCP-Beispiele:
Fingergreifer: Positionierung des TCP an der Stelle, an welcher der Greifer das Teil greifen wird (Abb. 236).
Vakuumgreifer: Positionierung des TCP am Ende des Greifers.
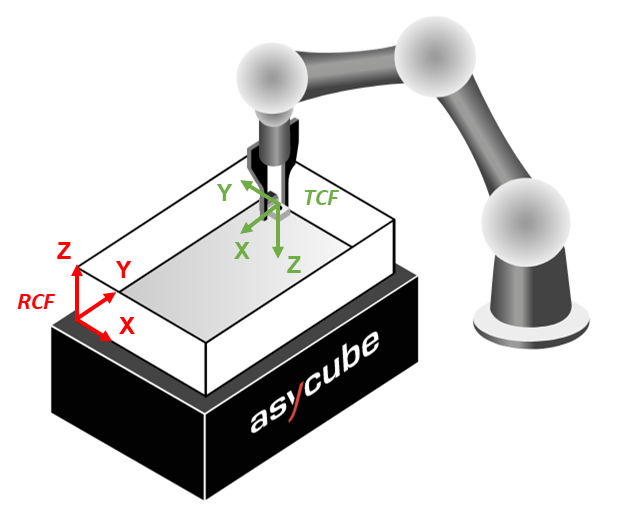
Abb. 236 Position des RCF und des TCF. Grünes Koordinatensystem: TCF; Rotes Koordinatensystem: RCF
RZ-Winkelkorrektur
EYE+ richtet die x-Achse des TCF an der x-Achse des für die Hand-Augen Kalibrierung verwendeten Koordinatensystems aus (normalerweise das RCF). Der RZ-Winkel wird korrigiert, um einen eventuellen Offset zwischen dem TCF und dem für die Hand-Augen Kalibrierung verwendeten Koordinatensystem auszugleichen.
Bemerkung
Ein zusätzlicher Offset kann erforderlich sein, wenn z. B. das RCF nicht gleich ausgerichtet ist wie das TCF.
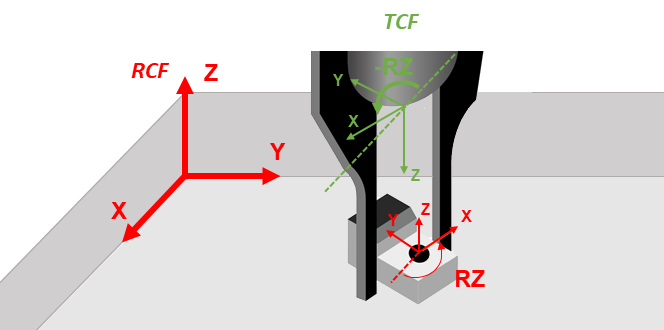
Abb. 237 Von EYE+ gesendeter RZ-Winkel
Wie wird im Falle eines statischen Fehlers der RZ-Winkel korrigiert?
EYE+ kann keinen Offset zwischen dem Koordinatensystem, das während der Hand-Augen Kalibrierung verwendet wurde (normalerweise das RCF) und dem TCF berücksichtigen. Daher kann ein statischer Offset erforderlich sein. Die folgende Abbildung illustriert diese Situation: RCF und TCF sind nicht aufeinander abgestimmt.
Sie können entweder Ihr TCF richtig ausrichten oder den statischen Fehler jedes Mal korrigieren, wenn Sie den Winkel von EYE+ erhalten.
Gehen Sie wie folgt vor, um die statische Korrektur zu ermitteln:
Platzieren Sie ein Teil mit Ihrem Greifer auf dem Asycube (kann an beliebiger Stelle mit beliebiger Ausrichtung sein).
Wenn das Teil korrekt platziert ist, beachten Sie den von Ihrem Roboter vorgegebenen RZ-Winkel.
Bewegen Sie den Roboter aus dem Sichtfeld, ohne das Teil zu bewegen, und überprüfen Sie den von EYE+ gesendeten Winkel, indem Sie den Befehl get_part im TCP-Terminal in EYE+ eingeben.
Bemerkung
Lesen Sie den Abschnitt TCP-Programmierungsanleitung, wenn Sie weitere Informationen dazu benötigen.
Wenden Sie auf der Roboterseite eine statische Korrektur an, um den gleichen Winkel auf dem Roboter und auf EYE+ zu haben.
Überprüfen Sie die Korrektur, indem Sie das Teil anders ausrichten. Der Roboter und EYE+ sollten den gleichen Wert anzeigen.
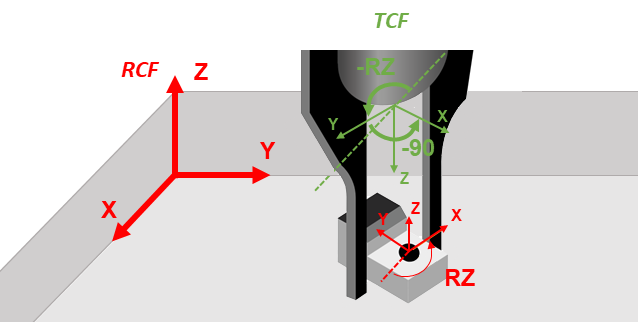
Abb. 238 Von EYE+ gesendeter RZ-Winkel mit TCF, der einen Offset von 90° zum erwarteten Winkel hat
Wie kann ich die Genauigkeit der Hand-Augen Kalibrierung verbessern?
Verwendung eines für die Hand-Augen Kalibrierung bestimmten Teils
Teil, das den Greifer führt: Sie können ein spezifisches Teil verwenden, um die Hand-Augen Kalibrierung durchzuführen. Abb. 239 zeigt ein Beispiel eines Teils, das die Spitze des Greifers in eine bestimmte Position führt. Auf diese Weise kann die Positionierung des Greifers genauer bestimmt werden.
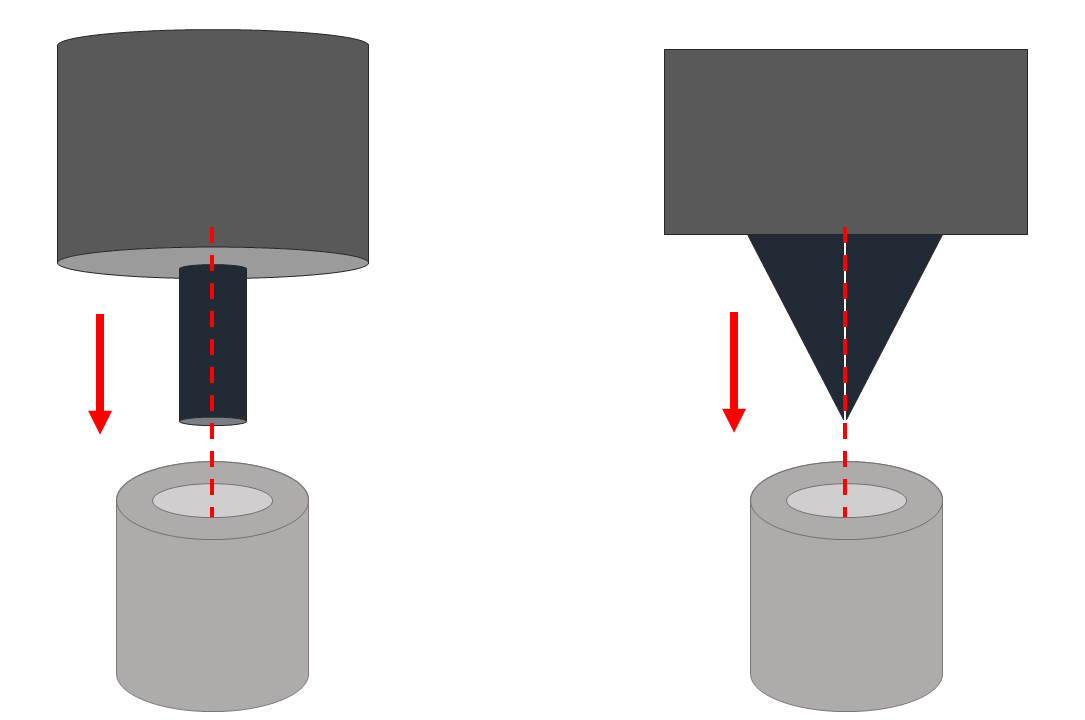
Abb. 239 Beispiel eines Teils, das den Greifer führt
Teil mit einer einfachen Form: Eine einfache Form erlaubt die Festlegung genauerer Koordinaten für die Entnahmeposition im Rezept.
Teil mit geringer Höhe: Wenn das Teil eine geringe Höhe hat, wird die Korrektur der Parallaxe für die Bestimmung der Entnahmeposition nicht berücksichtigt. Dadurch wird der Positionierungsfehler minimiert.
Achten Sie darauf, dass die Spitze des Greifers genau an der Entnahmeposition steht.
Bemerkung
Wenn Ihr TCP nicht am Ende des Greifers positioniert ist, versuchen Sie, den Greifer möglichst senkrecht auszurichten.
Bemerkung
Wenn Sie ein bestimmtes Teil nur zur Durchführung der Hand-Augen Kalibrierung verwenden, müssen Sie das Rezept nicht bis zum Ende bearbeiten. Sie können die Bearbeitung des Rezepts nach dem Schritt der Entnahmeposition beenden.
Wichtig
Wenn Sie für die Hand-Augen Kalibrierung nicht den gleichen Greifer wie in der Produktion benutzen, berücksichtigen Sie bitte unbedingt deren unterschiedlichen TCP.
Positionierung der Teile
Position auf der Platte: Platzieren Sie die 4 Teile so weit voneinander entfernt wie möglich, ohne dass sie den Rand des Asycubes berühren. Die 4 besten Positionen befinden sich in den Ecken des Asycubes. Je mehr sich die 4 Koordinaten unterscheiden, desto besser ist die Kalibrierung.
Relative Position: Das Teil darf sich zwischen der Erfassung der Roboterkoordinaten und der Erfassung der Vision-Koordinaten nicht bewegen.