Warnung
Sie lesen eine alte Version dieser Dokumentation. Wenn Sie aktuelle Informationen wünschen, schauen Sie bitte unter 5.4 .2.2 Ergebnisse
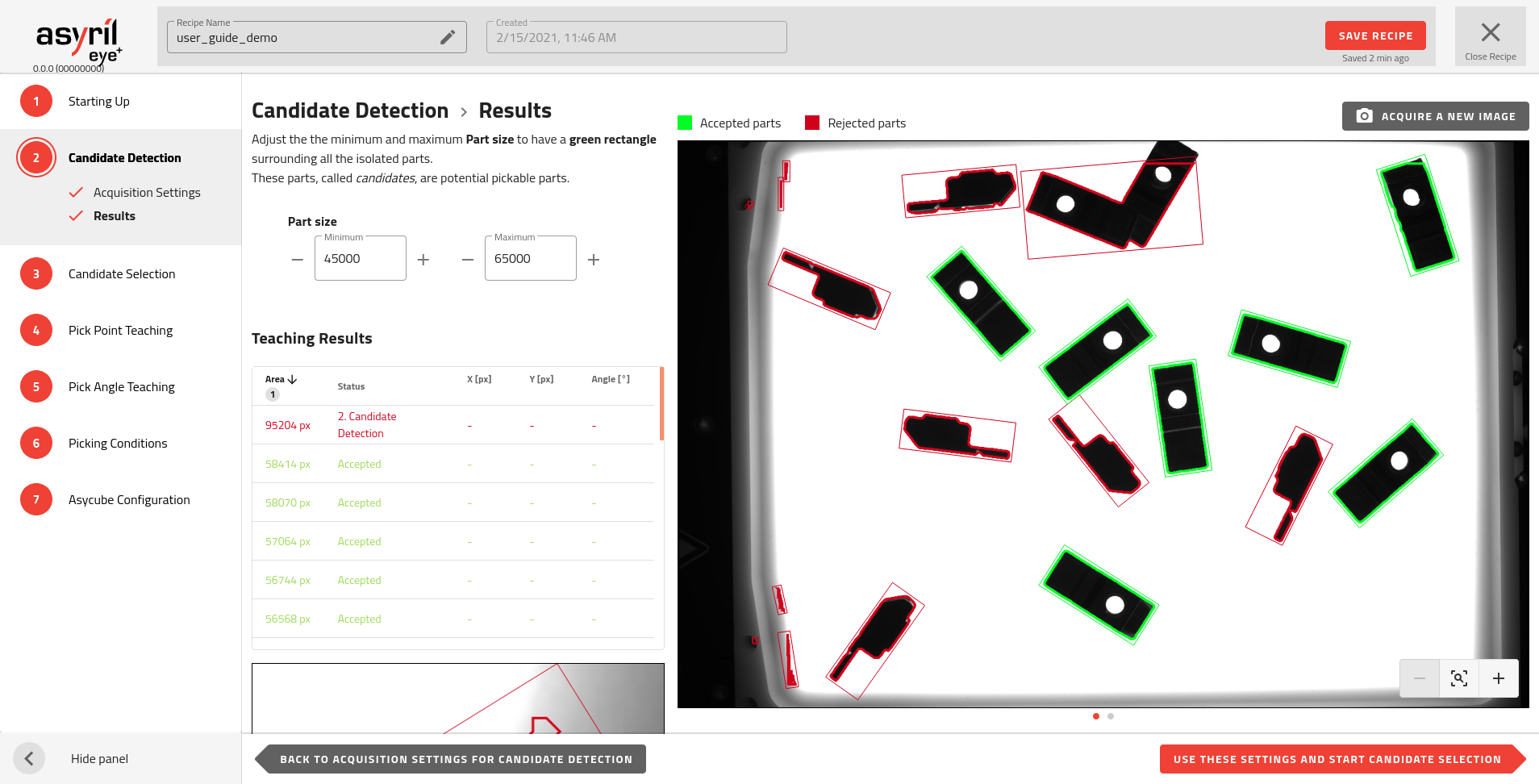
Abb. 69 Kandidatenerkennung - Ergebnisse
Alle vom Algorithmus erkannten Konturen können nun abhängig von ihrer Fläche gefiltert werden. Sie müssen definieren, welche Fläche (d.h. Grösse der Teile) als gut angesehen wird, indem Sie die Minimal- und Maximalwerte einstellen. Diese Werte sind je nach Kamerakonfiguration entweder in kalibrierten Einheiten oder in Pixeln anzugeben. Alle Konturen, die innerhalb dieses Flächenbereichs liegen, werden als Kandidaten für die nächsten Schritte betrachtet, der Rest wird verworfen.
Wichtig
Wenn ein Teil am Ende dieses Schritts nicht von einem grünen Rechteck umgeben ist, wird es von allen folgenden Schritten ausgeschlossen. Dies bedeutet, dass es nicht vom Roboter entnommen wird, bevor eine neue Vibration erfolgt und sich die Position oder die Ausrichtung des Teils verändert.
Tipp
Sie können die Teile manuell auf der Plattform verschieben und dann auf die Schaltfläche „EIN NEUES BILD AUFNEHMEN“ drücken, um ein neues Bild zu analysieren und zu prüfen, ob die Kandidatenerkennung gut funktioniert.
Bemerkung
Wenn das Teil etwas ausserhalb des Untersuchungsbereichs (ROI) liegt, wird der erkannte Umriss des Teils wie in Abb. 70 gezeigt angeschnitten. Die Begrenzungsrahmen können dadurch verschiedene Grössen vorweisen. Dieses Teil kann in den nächsten Schritten verwendet werden, Sie sollten sich aber bewusst sein, dass das Teil aus Sicht des Systems an der Seite geschnitten ist.
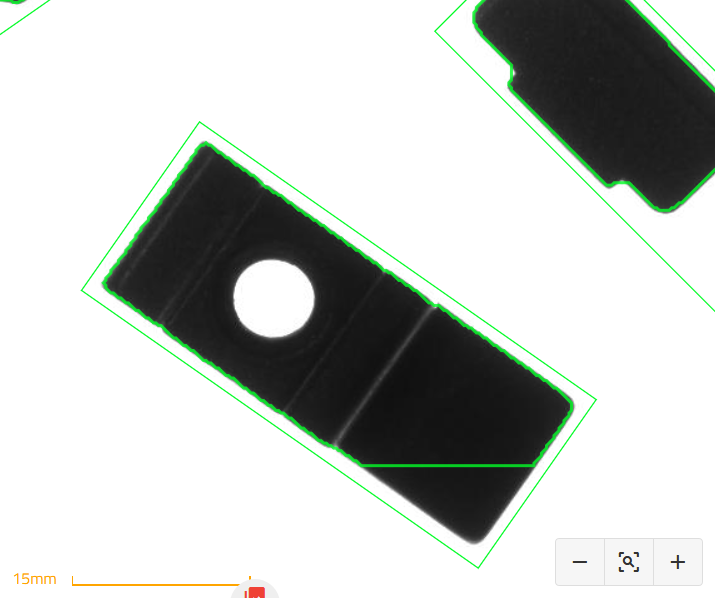
Abb. 70 Das Teil ist angeschnitten, weil es etwas ausserhalb des Untersuchungsbereichs (ROI) liegt.
Grösse des Teils ist zu klein oder zu gross
Zu niedrig: Risiko, kleine Schatten oder Verschmutzungen fälschlicherweise als Teile zu betrachten.
Zu hoch: Risiko, eine Gruppe von Teilen als ein einzelnes Teil zu betrachten.
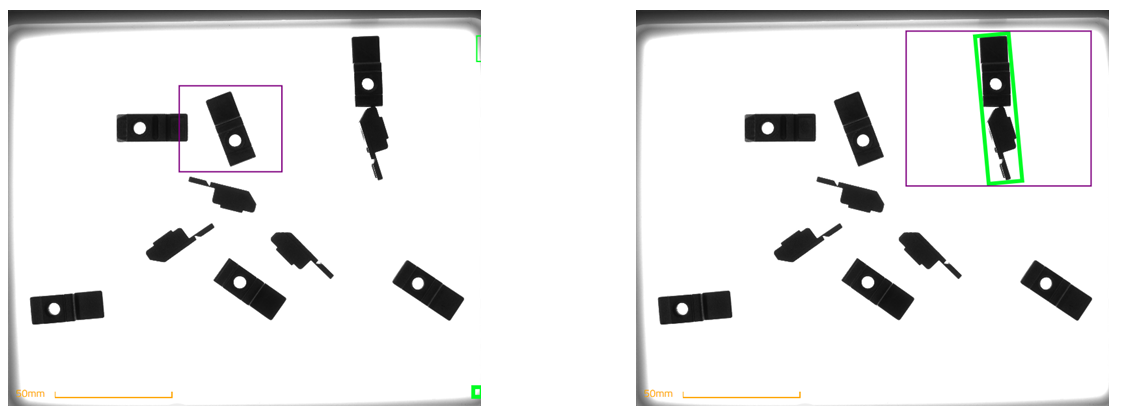
Abb. 71 Grösse des Teils: zu klein (links), zu gross (rechts) [Hintergrundbeleuchtung - 13ms]
Grössenbereich ist zu knapp oder zu weit
Zu knapp: Die Erkennung der Teile ist möglicherweise nicht robust genug, um ein Teil in verschiedenen Positionen im Bild zu erkennen (leichte Veränderung der von der Kamera gesehenen Oberfläche des Teils). Das Risiko besteht darin, ein Teil abzulehnen, nur weil seine Oberfläche leicht ausserhalb des festgelegten Bereichs liegt.
Zu weit: Risiko, zu viele unterschiedliche Teilegrössen zu erkenne sowie Gruppen von Teilen als ein einziges Teil zu betrachten.
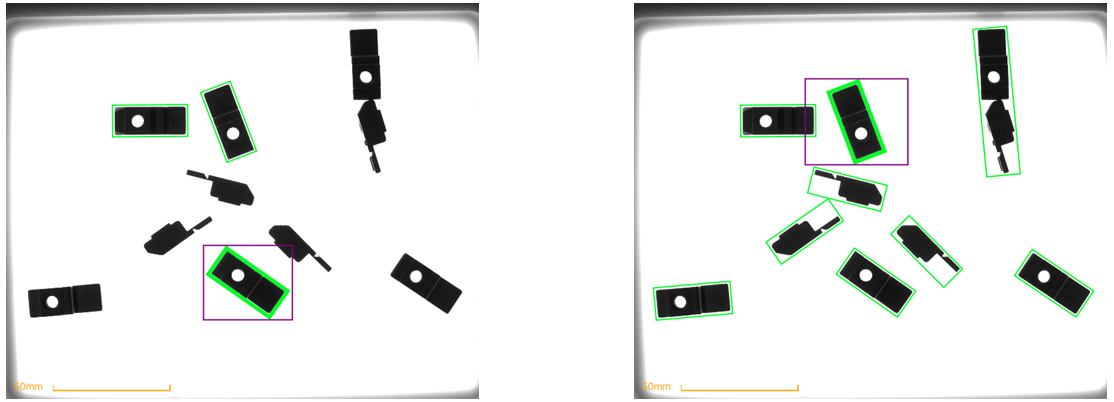
Abb. 72 Grössenbereich ist zu knapp (links) oder zu weit (rechts) [Hintergrundbeleuchtung - 13ms]