Warning
You are reading an old version of this documentation. If you want up-to-date information, please have a look at 5.4 .Alternating part types
First option
The multi_part_quantity parameter is used to ask EYE+ to look for one or several
parts of a specific type, either a or b. This means that every time EYE+ takes a picture, it will look for at
least <n> parts of the specific type(s) on the image. If it does not find those parts, no coordinates will be sent and
it will start vibrating and taking a new image until it gets those <n> parts.
This parameter influences the operation of the command get_part and prepare_part.
The following scenario describes how to get a part of type a, then a part of type b and so on, always in an
alternating way.
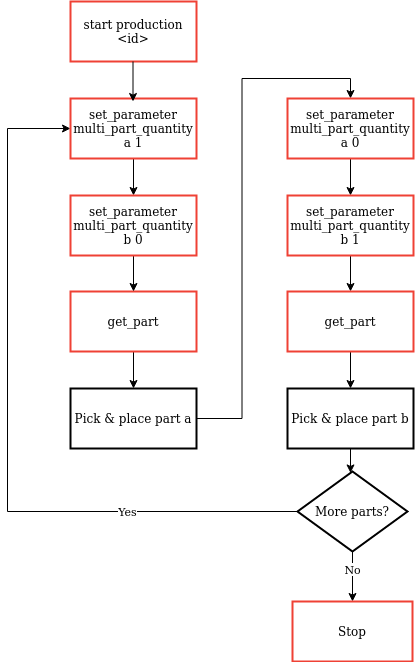
Fig. 241 Production scenario for alternating part types
[set_parameter multi_part_quantity a 1]: Set the parameter multi_part_quantity for
ato 1.[set_parameter multi_part_quantity b 0]: Set the parameter multi_part_quantity for
bto 0.[get_part]: Call the command get_part, it will either vibrate the Asycube and take a picture or send directly the coordinates of one part
a. The Asycube vibration and image analysis will not end until the system finds one or more partato fulfill the request. Since multi_part_quantity forbis set to 0, no partbwill be ever returned here.[Pick & place part a]: Pick and place the part of type
a.[set_parameter multi_part_quantity a 0]: Set the parameter multi_part_quantity for
ato 0.[set_parameter multi_part_quantity b 1]: Set the parameter multi_part_quantity for
bto 1.[get_part]: Call the command get_part, it will either vibrate the Asycube and take a picture or send directly the coordinates of one part
b. The Asycube vibration and image analysis will not end until the system finds one or more partbto fulfill the request. Since multi_part_quantity forais now set to 0, no partawill be ever returned here.[Pick & place part b]: Pick and place the part of type
b.Start again from step 1. The cycle stops when EYE+ receives the command stop production.
Second option
The following scenario is not strictly speaking equivalent to the first option described above but it could be used to
achieve a similar result. Instead of requesting alternatingly a part a and a part b, we ask now for both a
and b at the same time. Here, the system will ensure that get_part returns both parts in the same response.
This means that at least one part of each type must be pickable at the same time.
This can be useful if the robot has e.g. two grippers and must pick both a and b in order to continue its
operation.
Requiring both a and b to be pickable at the same time reduces the probability that get_part can be fulfilled
after a feeding sequence and can therefore increase the cycle time of the application.
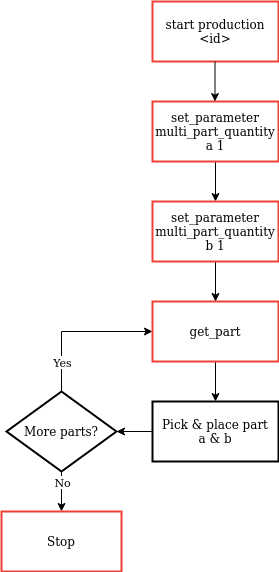
Fig. 242 Production scenario to always get one part a and one part b
[set_parameter multi_part_quantity a 1]: Set the parameter multi_part_quantity for
ato 1.[set_parameter multi_part_quantity b 1]: Set the parameter multi_part_quantity for
bto 1.[get_part]: Call the command get_part, it will either vibrate the Asycube and take a picture or send directly the coordinates of one part
aand one partb. The Asycube vibration and image analysis will not end until the system finds one or more part of both types to fulfill the request.[Pick & place part a & b]: Pick and place the part of type
aand the part of typeb.Start again from step 1. The cycle stops when EYE+ receives the command stop production.