Warning
You are reading an old version of this documentation. If you want up-to-date information, please have a look at 1.4 .Plugin installation
1. Check robot software
Option: User Socket Msg (R648)
The plugin uses socket messaging over TCP/IP protocol. You must have the optional “User Socket Msg” software (R648) installed on your robot to enable socket communication.
If it is correctly installed, the following information should be displayed on the IPendant touch under the path
MENU > STATUS > Version ID > Media and select NEXT > ORDER FI.
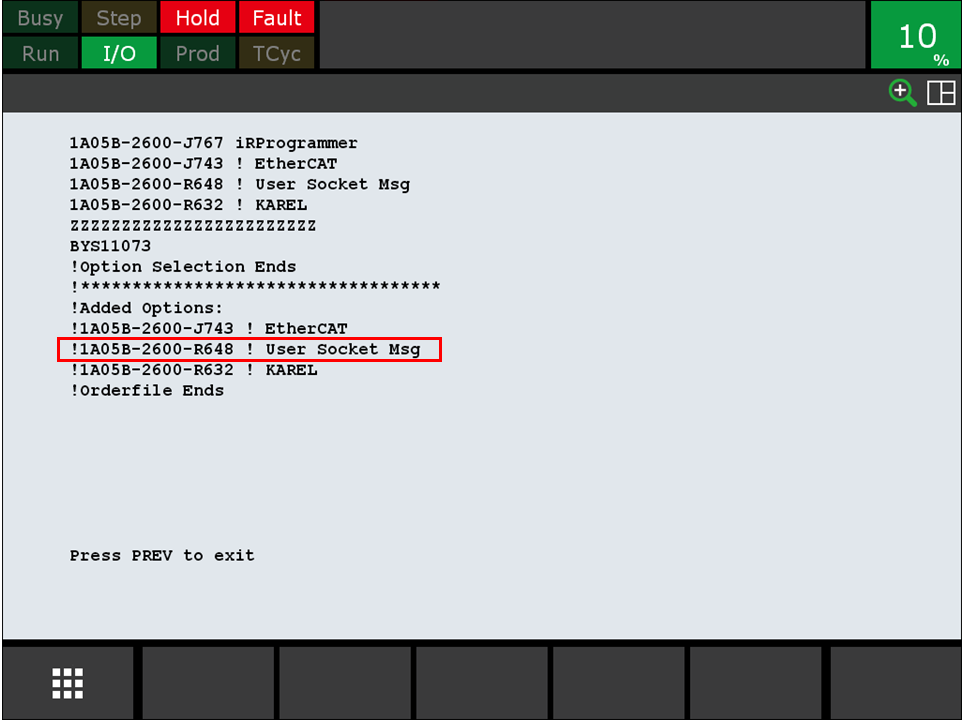
Fig. 1 User Socket Messaging - R648
Important
If the software is not installed on your robot, please contact FANUC support to get it.
Option: KAREL (R632)
The plugin works on KAREL programs. To be able to load them and call them in your programs, you must have installed the option “KAREL (R632)”.
If it is correctly installed, the following information should be displayed on the IPendant touch under the path
MENU > STATUS > Version ID > Media and select NEXT > ORDER FI.
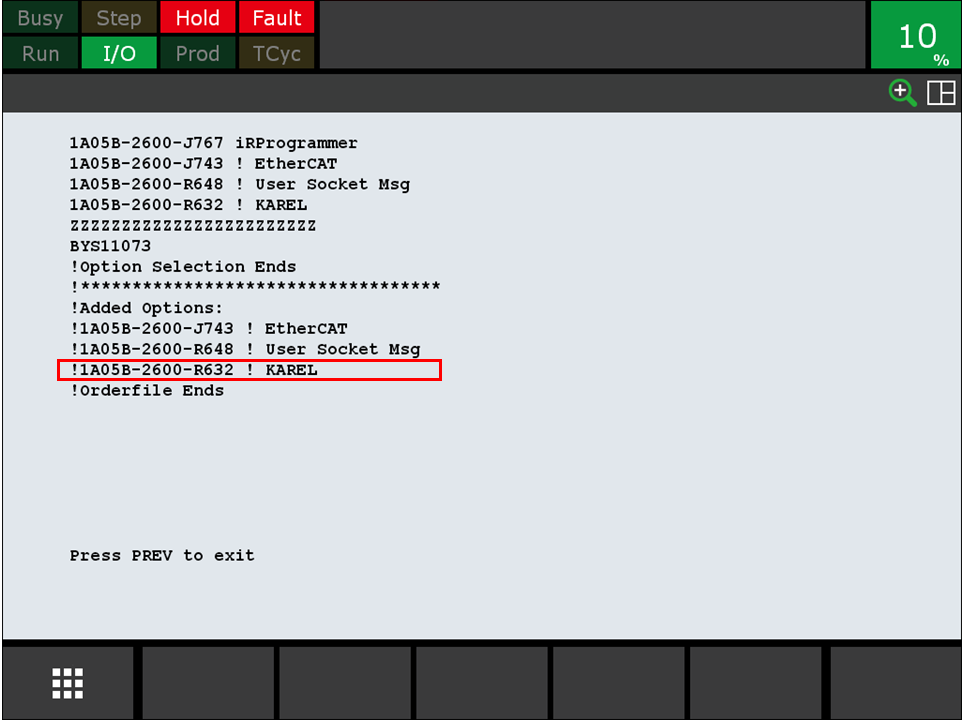
Fig. 2 KAREL - R632
Important
If the software is not installed on your robot, please contact FANUC support to get it.
2. Download the plugin
Download the plugin zip file fanuc-eyeplusPlugin-v1.3.0.zip here. It must contain 1 folder with 10 p-code files:
fanuc-eyeplusPlugin-v1.3.0-R30iB-PLUS/…
EYE_CHECK_LAST_ERROR.pc
EYE_CONFIGURE.pc
EYE_GET_PART.pc
EYE_PREPARE_PART.pc
EYE_RAW_COMMAND.pc
EYE_START_PRODUCTION.pc
EYE_STOP.pc
IPL_ASYRIL_EYE_CFG.pc
IPL_ASYRIL_EYE_IN_CMD_1.pc
IPL_ASYRIL_EYE_IN_CMD_2.pc
3. Install the plugin on your robot
Unzip the fanuc-eyeplusPlugin-v1.3.0.zip file and save the 10 files on a USB key.
Warning
Your USB key must be formatted to FAT or FAT32 (File Access Tables) to be detected by the controller.
Note
If an older version of the EYE+ plugin is already installed, you must uninstall each file manually before installing the new version.
Connect the USB key to the IPendant touch of the robot. On the IPendant touch, go to
MENU > FILE > UTILE > Set Device > Select your device. Then, for each file, select the file and click LOAD.
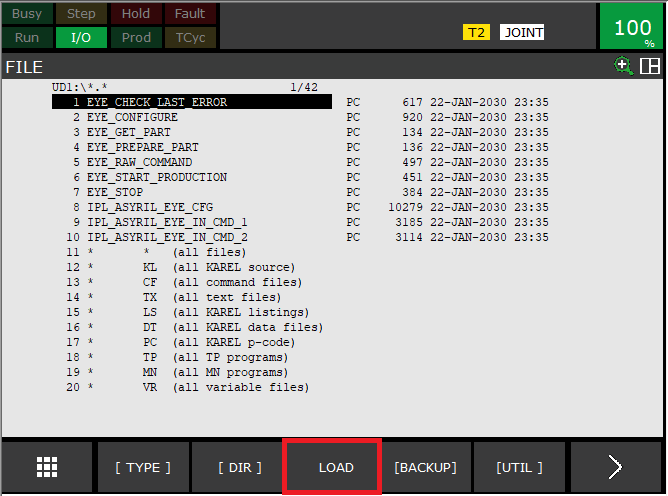
Fig. 3 Select the .pc file and click on LOAD
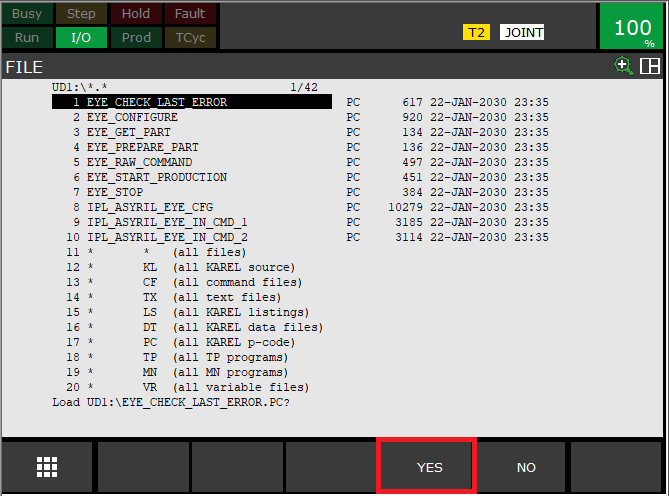
Fig. 4 Click on YES to load the file
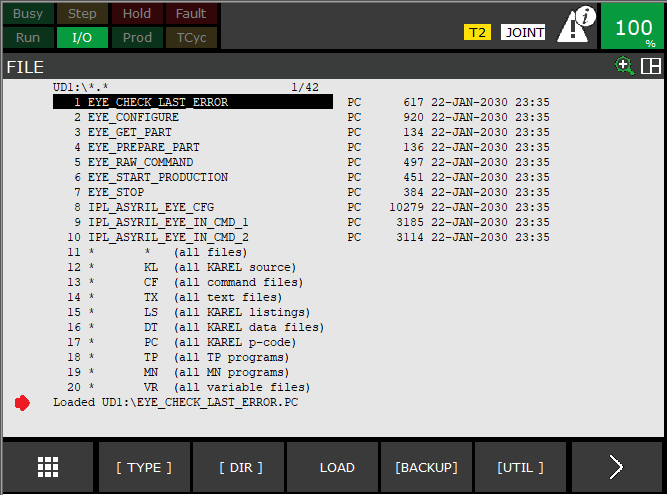
Fig. 5 Wait until the message Loaded UT1:\EYE_CHECK_LAST_ERROR.PC is displayed on the IPendant touch.
4. Check if the files are correctly installed
From the IPendant touch, go to SELECT > [TYPE] > KAREL Progs. Then check if the 10 files are listed in this window
as shown in Fig. 6.
Note
The version of the plugin you downloaded must be displayed on the side.
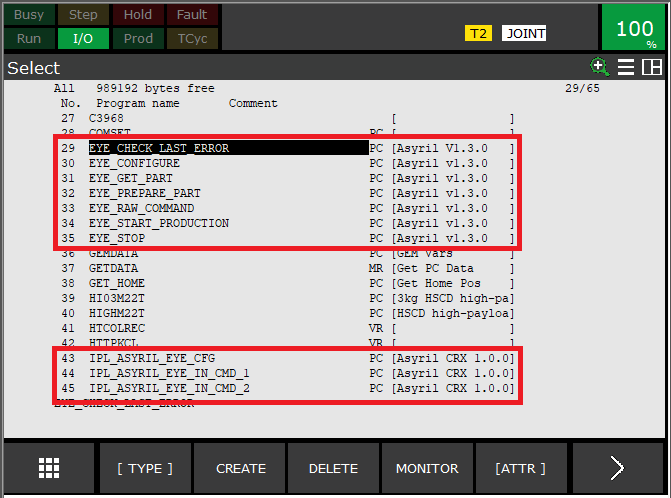
Fig. 6 Check the installation of the files