Avertissement
Vous lisez une ancienne version de cette documentation. Si vous souhaitez obtenir des informations actualisées, veuillez consulter 5.4 .Force take image
Le scénario avec la commande force_take_image est utilisé lorsque vous savez que les pièces sur l’Asycube vont bouger à cause de perturbations externes. Ces perturbations peuvent survenir lors du prélèvement ou de la mise en place d’une pièce, ou simplement lors d’un mouvement du robot.
La commande force_take_image est alors utile afin de s’assurer que les coordonnées des pièces sont correctes en générant une autre image après les perturbations connues. Voir Fig. 177 pour une intégration simple avec une commande get_part.
Remarque
Si le paramètre can_take_image est réglé sur false, la commande force_take_image ne démarrera pas.
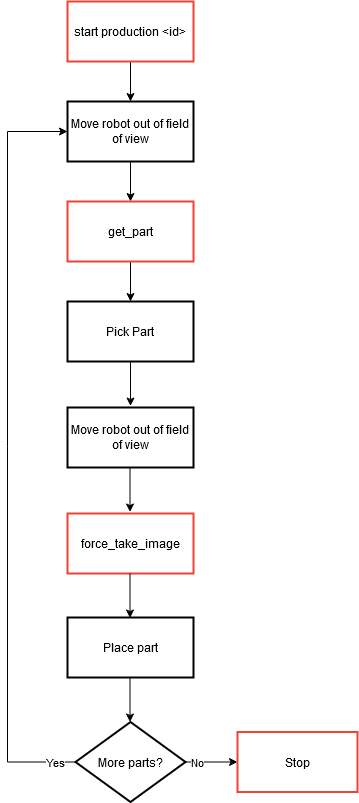
Fig. 177 force_take_image avec get_part : 2 possibilités

Le scénario de gauche à la Fig. 177 suit les étapes suivantes :
[Déplacer le robot hors du champ de vue]: Avant d’appeler la commande get_part, vous devez vous assurer que rien n’obstrue la vue de la caméra.
[get_part]: Appelez la commande get_part, soit elle fera vibrer l’Asycube et prendra une photo, soit elle vous enverra directement les coordonnées d’une pièce.
[Prélèvement de la pièce]: Prélevez la pièce. Lorsque la pièce est prélevée, le robot touche l’Asycube et fait bouger les autres pièces.
[force_take_image]: Forcez EYE+ à acquérir une image pour adapter les coordonnées déjà stockées dans la mémoire selon les coordonnées des nouvelles positions.
Recommencez à partir de l’étape 1. Le cycle s’arrête lorsque EYE+ reçoit la commande stop production.