Avertissement
Vous lisez une ancienne version de cette documentation. Si vous souhaitez obtenir des informations actualisées, veuillez consulter 5.4 .5. Apprentissage de l’angle de prise
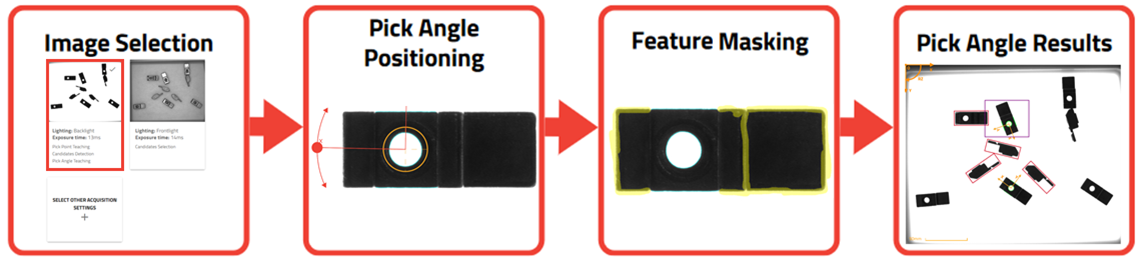
Fig. 101 Aperçu de l’apprentissage de l’angle de prise
En fonction de la géométrie de vos pièces, vous devrez peut-être connaître l’angle de la pièce pour que le robot puisse la prélever. L’objectif de cette étape est d’enseigner au système un nouveau modèle de référence (basé sur le même candidat de référence) et de spécifier l’orientation relative de la pièce par rapport à ce modèle.
Le modèle de référence est défini par les caractéristiques détectées sur le même candidat de référence utilisé pour l’étape précédente. À partir des caractéristiques de référence, l’orientation des axes X et Y de la pièce définira l’orientation de la pièce.
L’angle de l’orientation de la pièce est utilisé pour définir l’angle RZ des candidats envoyé par EYE+ lorsque get_part est exécuté.
Remarque
Cette étape est facultative, elle peut être ignorée si votre pièce n’a pas d’angle de prise. Pour ignorer cette étape, cliquez sur .
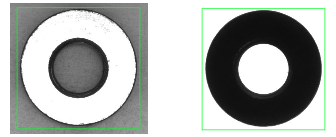
Fig. 102 Une rondelle n’a pas d’angle de prise (éclairage frontal : à gauche, rétroéclairage : à droite)