Avertissement
Vous lisez une ancienne version de cette documentation. Si vous souhaitez obtenir des informations actualisées, veuillez consulter 5.4 .Étalonnage main-œil - bonnes pratiques
Système de coordonnées du robot (Robot coordinate frame RCF)
Le système de coordonnées du robot peut être placé n’importe où, cela ne changera pas les performances de l’étalonnage main-œil. Cependant, nous vous conseillons de prendre en considération les points suivants :
Système de coordonnées du robot sur le même plan que l’Asycube: Placez le Z=0 du système de coordonnées du robot au même niveau que la plateforme de l’Asycube.
La position du robot pour prélever une pièce correspondra uniquement aux coordonnées \((x,y)\) fournies par EYE+ et de la hauteur de prise de la pièce \(z\) pour votre application robot.
Le fait de placer le RCF sur le même plan que la plateforme de l’Asycube garantit la validité des coordonnées \(z\) entrées manuellement. Si vous utilisez le système de coordonnées mondial, la plateforme de l’Asycube pourrait ne pas être parfaitement parallèle à la base du robot. Cela signifie que la coordonnée \(z\) pourrait dépendre des coordonnées \((x,y)\).
L’origine du système de coordonnées du robot correspond à l’un des quatre coins de l’Asycube : Les coordonnées envoyées par EYE+ sont plus faciles à visualiser lorsque l’origine se trouve dans un coin (Fig. 227).
Point central de l’outil (Tool center point TCP)
Le système de coordonnées est utilisé pour aider le robot à se déplacer dans l’espace. Sans outils ni pinces sur le robot, l’extrémité du bras est utilisée comme point de référence pour le contrôle des mouvements (TCP sur la dernière articulation du robot).
Le Controller peut déplacer simultanément chacune des articulations du robot pour déplacer le point de référence dans l’espace aux positions demandées. Lorsque vous ajoutez un outil ou une pince au bras du robot, le point de référence doit changer afin de refléter le décalage représenté par l’outil. Un point central de l’outil ou Tool Center Point (TCP) est utilisé pour créer le décalage requis. Cela permet au Controller de déplacer le système de coordonnées pour suivre l’outil au lieu de l’extrémité du bras.
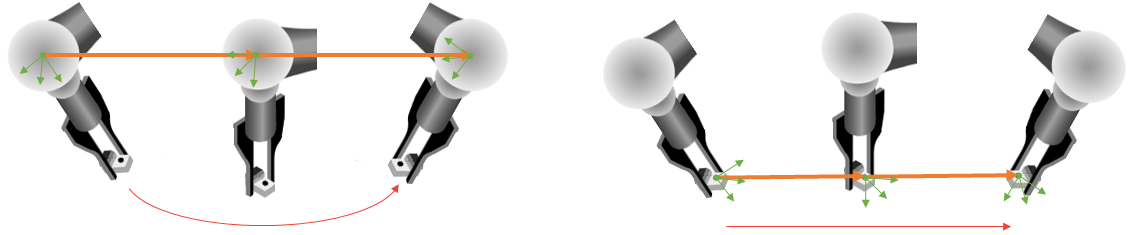
Fig. 226 à gauche : TCP sur la dernière articulation du robot ; à droite : TCP avec le décalage de l’outil
Système de coordonnées de l’outil (Tool coordinate frame TCF)
Le système de coordonnées de l’outil est positionné sur le Point central de l’outil (Tool center point TCP). Habituellement, le vecteur Z du TCF est orienté à l’opposé de la dernière articulation du robot ou à l’opposé de l’outil du robot. La position du TCP correspond à la position où vous voulez prélever la pièce.
Quelques exemples de TCP :
Préhenseur à doigts : Position du TCP là où le préhenseur va saisir la pièce (Fig. 227).
Préhenseur par aspiration : Position du TCP à l’extrémité du préhenseur.
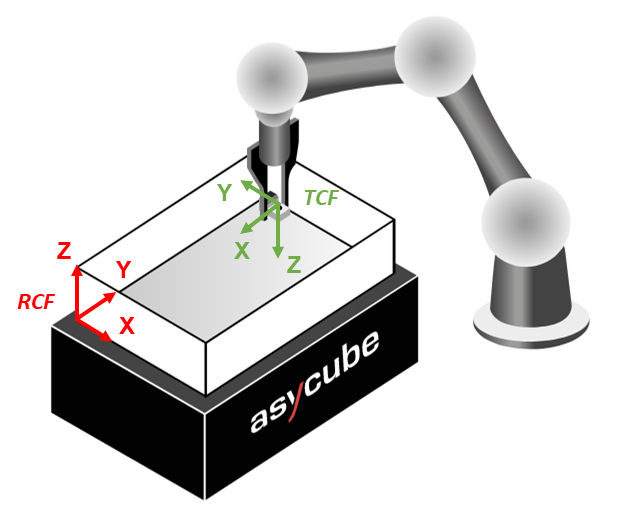
Fig. 227 Position du RCF et du TCF. Système de coordonnées vert : TCF ; Système de coordonnées rouge : RCF
Correction de l’angle RZ
EYE+ aligne l’axe x du système de coordonnées de l’outil sur l’axe x du système de coordonnées utilisé pendant l’étalonnage œil-main (généralement le système de coordonnées du robot). L’angle RZ est donc corrigé pour tenir compte de tout décalage entre le système de coordonnées de l’outil et le système de coordonnées utilisé pendant l’étalonnage œil-main.
Remarque
Un décalage supplémentaire peut être nécessaire lorsque, par exemple, le système de coordonnées du robot n’est pas alignée sur le système de coordonnées de l’outil.
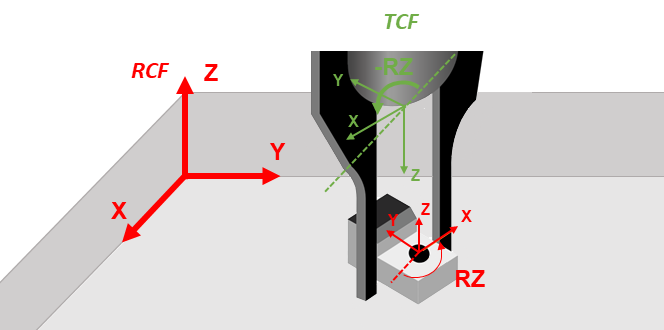
Fig. 228 Angle RZ envoyé par EYE+
Comment corriger l’angle RZ en cas d’erreur statique ?
EYE+ ne peut pas tenir compte du décalage entre le système de coordonnées utilisé pendant l’étalonnage main-oeil (généralement le système de coordonnées du robot) et le système de coordonnées de l’outil. Un décalage statique peut donc être nécessaire. La figure suivante illustre cette situation : Le système de coordonnées du robot et le système de coordonnées de l’outil ne sont pas alignés.
Vous pouvez soit ajuster l’orientation de votre système de coordonnées de l’outil, soit corriger l’erreur statique chaque fois que vous sollicitez l’angle par le biais d’EYE+.
Pour trouver la correction statique, suivez les étapes ci-dessous :
Placez une pièce avec votre préhenseur sur l’Asycube (cela peut être n’importe où et avec n’importe quelle orientation).
Lorsque la pièce est correctement placée, notez l’angle RZ donné par votre robot.
Déplacez le robot hors du champ de vue sans déplacer la pièce et vérifiez l’angle envoyé par EYE+ en entrant la commande get_part depuis le Terminal TCP d’EYE+ .
Remarque
Si vous ne savez pas comment le faire, veuillez vous référer à la section Guide de programmation TCP.
Du côté du robot, appliquez une correction statique pour avoir le même angle sur le robot et sur EYE+.
Vérifiez la correction en déplaçant la pièce dans une autre orientation. Le robot et EYE+ doivent afficher la même valeur.
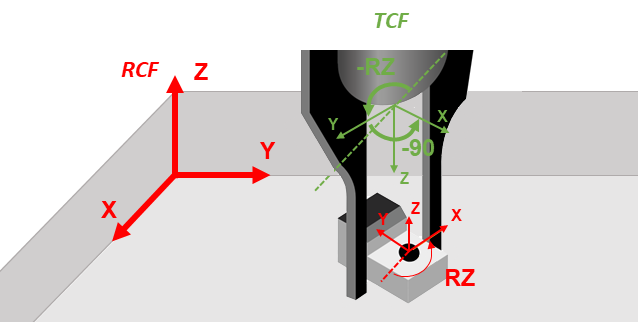
Fig. 229 Angle RZ envoyé par EYE+ avec un TCF ayant un décalage de 90° avec celui attendu
Comment puis-je augmenter la précision de l’étalonnage main-œil ?
Utilisation d’une pièce dédiée à l’étalonnage main-œil
Pièce guidant le préhenseur : Vous pouvez utiliser une pièce spécifique pour effectuer l’étalonnage main-œil. La Fig. 230 donne un exemple de pièce qui guide la pointe du préhenseur vers une position spécifique. De cette façon, le positionnement du préhenseur est plus précis.
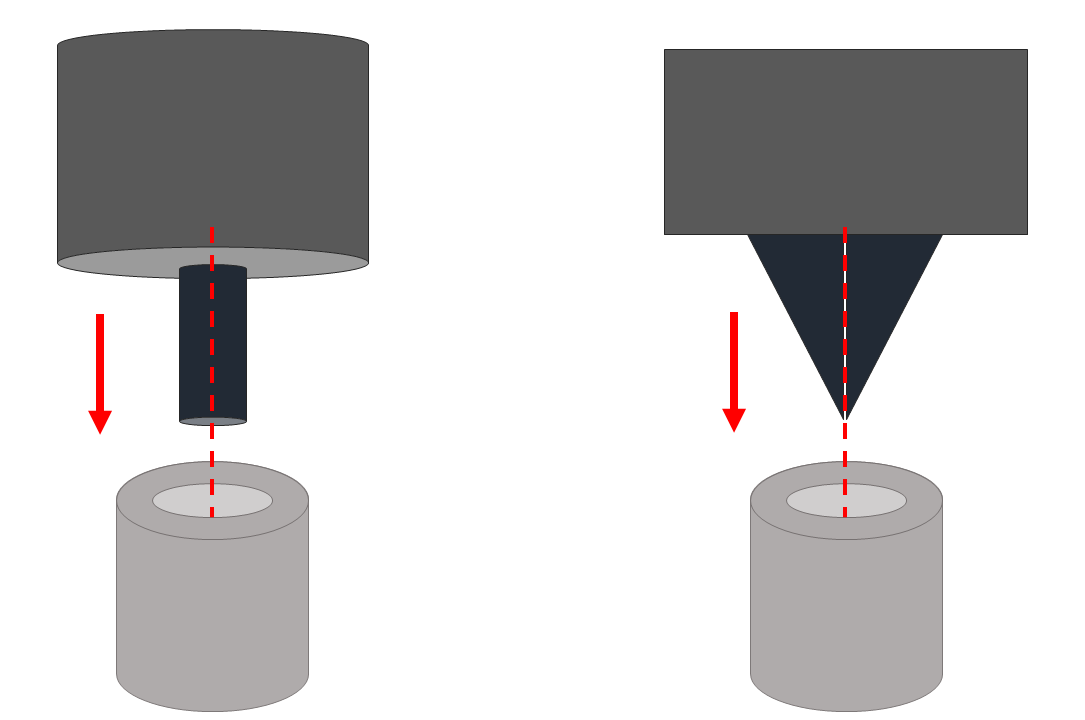
Fig. 230 Exemple de pièce guidant le préhenseur
Pièce ayant une forme simple: Une forme simple permet d’assurer la précision des coordonnées de la position de prélèvement dans la recette.
Pièce de faible hauteur : Si la pièce a une faible hauteur, la correction de la parallaxe ne sera pas prise en compte pour la position de prélèvement. Cela permet de minimiser l’erreur de positionnement.
Veillez à placer la pointe du préhenseur exactement à l’endroit de la position de prélèvement.
Remarque
Si votre TCP ne se situe pas à l’extrémité du préhenseur, essayez d’orienter le préhenseur aussi verticalement que possible.
Remarque
Si vous utilisez une pièce spécifique uniquement pour effectuer l’étalonnage main-oeil, il n’est pas nécessaire de terminer la recette jusqu’au bout. Vous pouvez arrêter l’édition de la recette après l’étape de la position de prélèvement.
Important
Si vous ne disposez pas du même préhenseur pour l’étalonnage main-œil que pour la production, veuillez vous assurer de prendre en compte la différence de leurs TCP.
Positionnement des pièces
Position sur la plateforme : Placez les 4 pièces aussi loin que possible les unes des autres sans qu’elles touchent le bord de l’Asycube. Les 4 meilleures positions se trouvent dans les quatre coins de l’Asycube. Plus la différence entre les 4 coordonnées est grande, plus l’étalonnage sera précis.
Position relative : La pièce ne doit pas bouger entre l’acquisition des coordonnées du robot et l’acquisition des coordonnées de la vision.