警告
現在、このドキュメントは古いバージョンをご覧いただいています。 最新の情報をご希望の場合は、下記をご参照してください 5.4 .2.2 結果
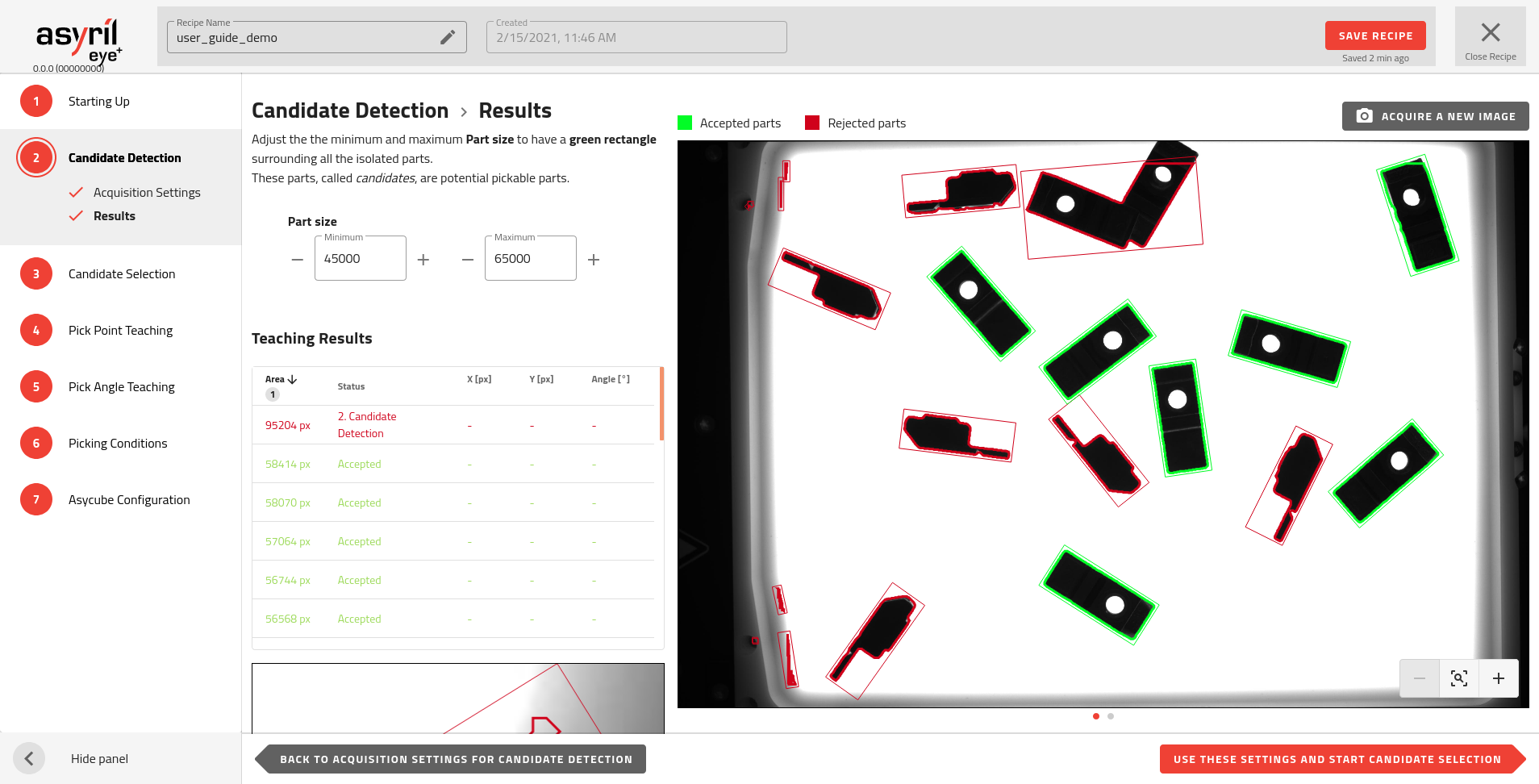
図 69 候補の検出 - 結果
アルゴリズムによって検出されたすべての輪郭線は、その面積のサイズによってフィルタリングできるようになりました。 最小値と最大値を調整することで、どの面積(すなわち部品サイズ)を良いとみなすかを定義します。これらの値は、カメラの設定に応じて、 キャリブレートされた単位 、またはピクセル単位で指定します。この範囲の面積に収まっている輪郭はすべて次のステップで候補となり、それ以外の輪郭は却下されます。
重要
このステップ完了後に部品が緑の四角形で囲まれていない場合、それらの部品は次のすべてのステップで破棄されます。すなわち、振動によってその部品の位置や向きが変更されない限り、ロボットにピックされないことに注意してください。
ヒント
アジキューブ上で手動で部品を移動させてから「新しい画像の取得」ボタンを押すと、新しい画像を解析して、候補の検出がうまくいっているかどうかを確認することができます。
注釈
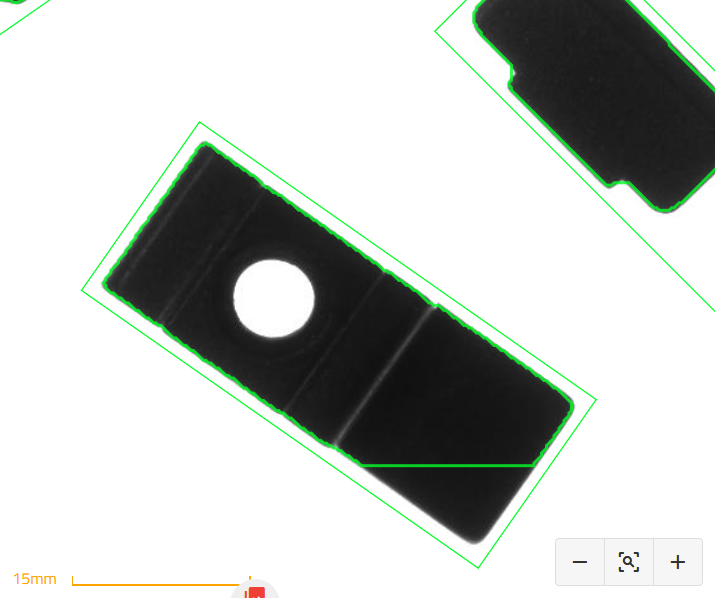
部品が 関心領域(ROI) から少し外れると、検出された部品の境界線は 図 70 で示されるようにカットされます。このため、バウンディングボックスのサイズが異なる場合があります。この部品はまだ次のステップで使用できますが、システム的にはサイドがカットされていることに注意してください。
部品サイズが小さすぎたり、大きすぎたりする場合
【小さすぎる】 小さな汚れや影を検出するリスクがあります。
【大きすぎる】 グループになった部品を単一の部品として検出するリスクがあります。
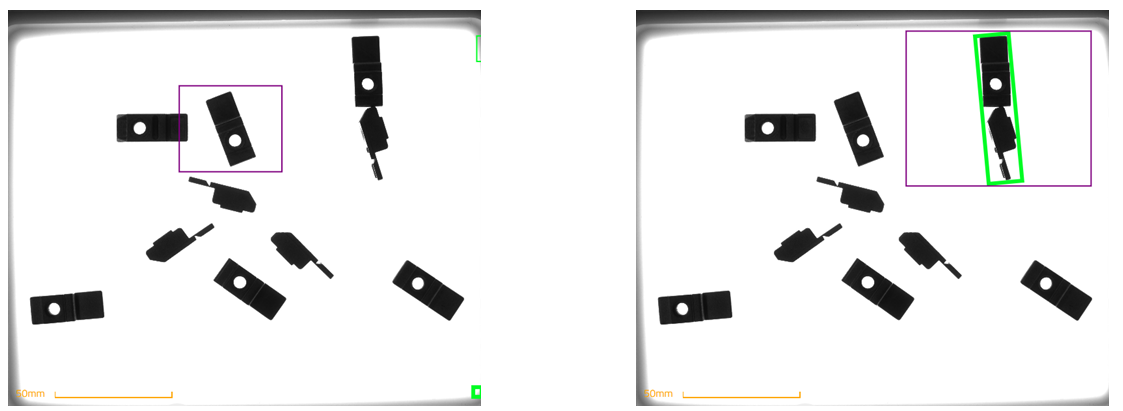
図 71 部品サイズ:小さすぎ(左)、大きすぎ(右) [バックライト-13ms]
部品サイズの範囲が狭すぎたり、広すぎたりする場合
【狭すぎる】 画像内の異なる位置にある部品(カメラで見た部品の表面のわずかな変化)を検出するのに十分なロバスト性がない場合があります。
【広すぎる】 異なる部品サイズを多く検出しすぎて、グループになっている部品を1個の部品として検出してしまうリスクがあります。
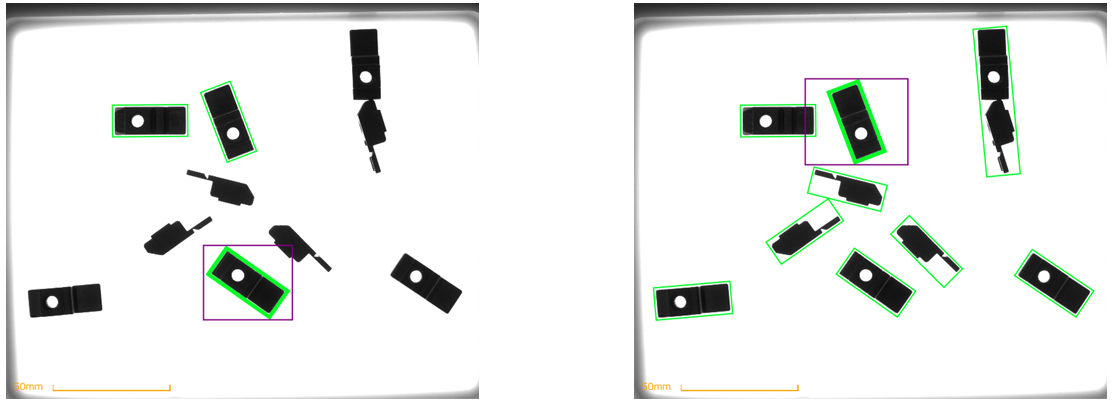
図 72 部品サイズの範囲が狭すぎる(左)、または広すぎる(右) [バックライト-13ms]