警告
現在、このドキュメントは古いバージョンをご覧いただいています。 最新の情報をご希望の場合は、下記をご参照してください 5.4 .3.3 候補の分類
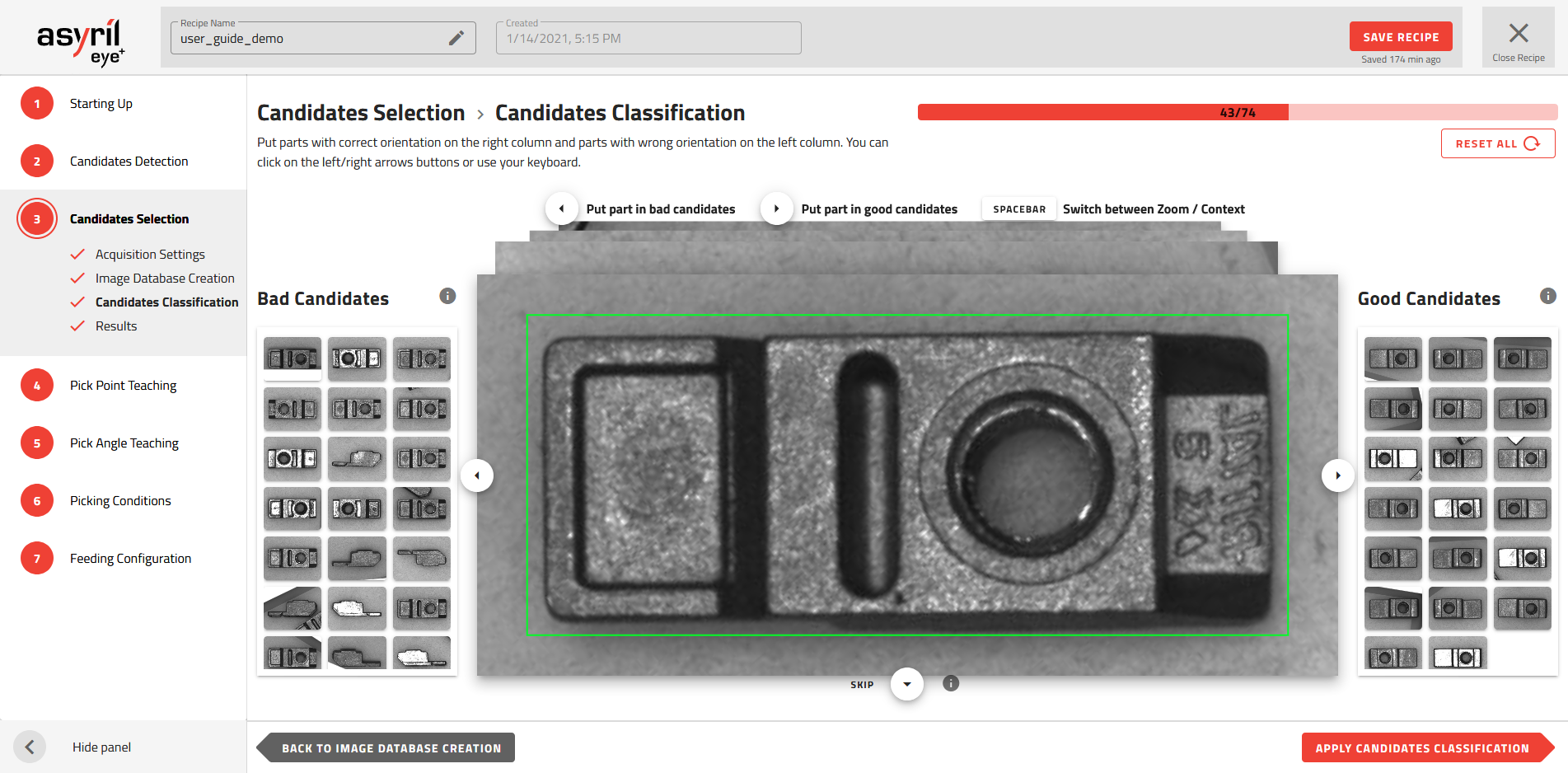
図 79 候補の選択 - 候補の分類
良い候補のプロフィールを選ぶ
候補の分類の段階で、何が良い候補で何が悪い候補かを定義します。良い候補とはロボットのピックに適した向きの候補( 図 80 )であり、悪い候補とはそれ以外の向きの候補です。
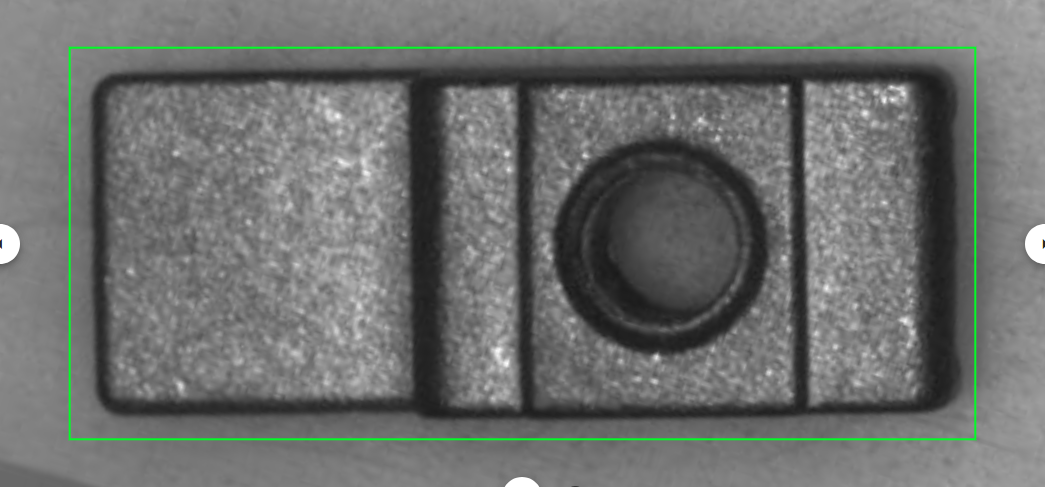
図 80 良い候補

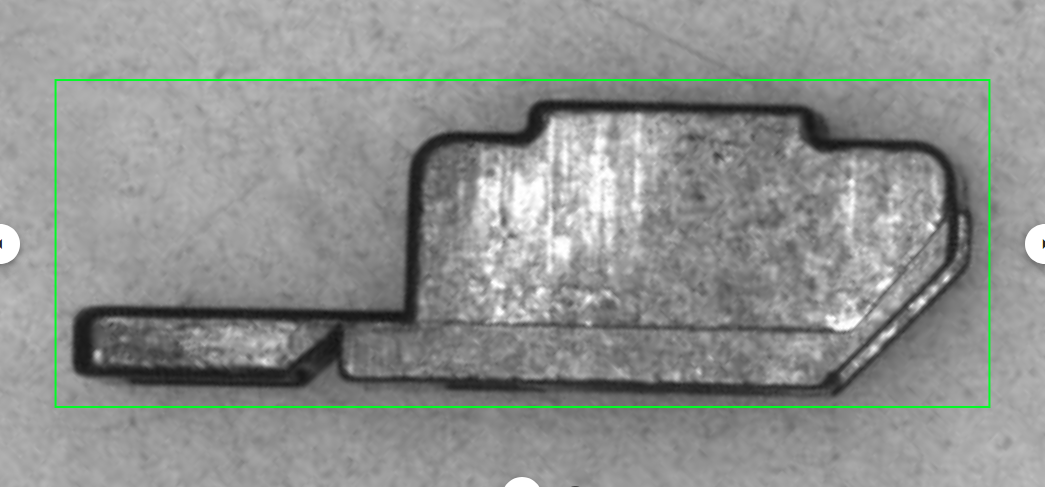
図 81 悪い候補
ロボットのピックに最適の向きである良い候補の特徴を決めた後に、それに一致するすべての部品をウィンドウの右側へ移動して、一致しない部品を左側に移動してください。
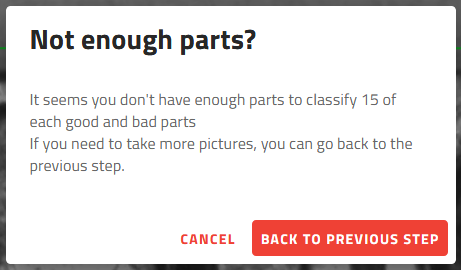
それぞれへ候補を少なくとも15個以上ずつ移動させてください。
注釈
AIアルゴリズムのロバスト性を高めるために、できるだけ多くのバリエーションで良し悪しの候補を左右に埋めていくのが良い方法です。
ヒント
![]() ボタンをクリックすると画像の分類をスキップすることができます。例えば、片方のデータベースがいっぱいなので、もう片方の画像の分類だけを続けたいときにご利用ください。
ボタンをクリックすると画像の分類をスキップすることができます。例えば、片方のデータベースがいっぱいなので、もう片方の画像の分類だけを続けたいときにご利用ください。
ヒント
![]()
![]()
![]() のボタンをクリックする代わりに、コンピュータのキーボードの矢印
のボタンをクリックする代わりに、コンピュータのキーボードの矢印  を使用することができます。
を使用することができます。
ヒント
をクリックすると、取得した画像を失うことなく、分類を完全にクリアすることができます。すべての部品が未分類としてマークされます。
分類の適用
をクリックすると、選択された候補に従って分類モデルを学習します。
画像を右側または左側に移動することで、それぞれの候補にラベル(良いか悪いかのラベル)を紐付けしています。分類を適用すると、これらのラベルを付けた画像がニューラルネットワークに供給され、 EYE+ が良い候補と悪い候補を区別できるようになります。