Plugin functions
You can start programming with the EYE+ plugin on your PBX or directly through RCX studio.
Important
The camera configuration and the hand-eye configuration must be done from the EYE+ studio before programming any commands. For further information, please refer to the Camera configuration wizard and Hand-eye calibration wizard.
To call a plugin command from your program, you must use the CALL command.
Warning
Do not use the following functions in your program:
EYE_READBUFFER1
EYE_READBUFFER2
EYE_INTERNAL_RAW1
EYE_INTERNAL_RAW2
EYE_TIMER
EYE_CHECK_IP
EYE_FIND
EYE_RAISE_ERROR
EYE_COORDINATES
EYE_SET_TIMEOUT
EYE_GET_TIMEOUT
EYE_CLEAR_BUFFER1
EYE_CLEAR_BUFFER2
These functions are used internally to manage the communication with your EYE+.
The following 7 commands are basic functions allowing to create a simple and easy to integrate pick and place.
EYE_CONFIGURE
EYE_START_PRODUCTION
EYE_STOP
EYE_GET_PART
EYE_PREPARE_PART
EYE_RAW_COMMAND
EYE_CHECK_LAST_ERROR
EYE_CONFIGURE(ipAdress$, port%, robotType%, pointNumber%)
Parameters
ipAdress$ - is the IP address of your EYE+. The parameter must be a string with the IP address format
x.x.x.x.port% - is the port number of your EYE+. The parameter must be an integer.
robotType% - is your robot type. The parameter must be an integer
robotType% = 1for SCARA robot,robotType% = 2for 6-axis robot.
pointNumber% - is the point number where coordinates of the part will be written. The parameter must be an integer between 0 and 9999.
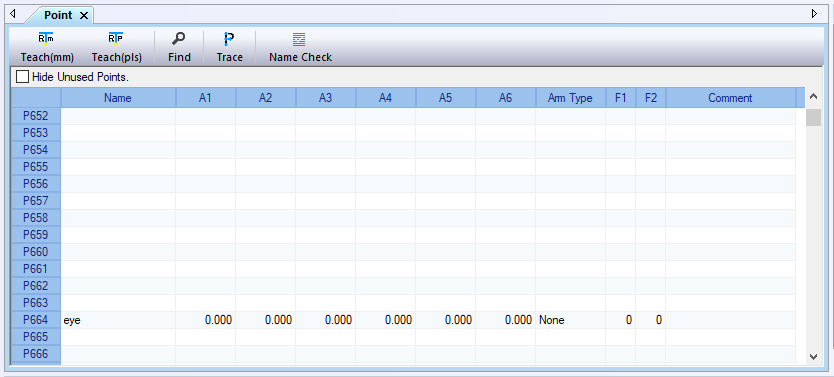
Fig. 5 Point definition if
pointNumber% = 664
Description
This command must be called at the beginning of your program. This command is used to:
Define GP6 and GP7 clients in General Ethernet Port.
Initializes the point where coordinates of the part will be written.
Note
If you do not configured the clients correctly, you will get the following error 602 - Client configuration error and the communication between your robot and your EYE+ will not start.
Warning
If you are already using the GP6 and GP7 clients, please contact our support team.
Usage example
1 ' Set clients configuration to 192.168.0.50:7171 for a SCARA robot
2 ' and define the point P664 for the part coordinates
3 CALL *EYE_CONFIGURE("192.168.0.50", 7171, 1, 664)
4 CALL *EYE_CHECK_LAST_ERROR
5 IF EYELastErr% = 602 THEN
6 HALT 'ERROR
7 ENDIF
EYE_START_PRODUCTION(recipeID%)
Parameters
recipeID% - the recipe’s unique identifier. The parameter must be an integer between 1 and 65535.
Description
This command must be called to start EYE+ in production state using the right recipe.
Usage example
1 CALL *EYE_CONFIGURE("192.168.0.50", 7171, 1, 664)
2 CALL *EYE_START_PRODUCTION(12345)
3 CALL *EYE_CHECK_LAST_ERROR
4 IF EYELastErr% = 0 THEN
5 ' EYE+ is in production
6 ENDIF
7 CALL *EYE_STOP("production")
EYE_STOP(state$)
Parameters
state$ - is an EYE+ states. The parameter must be a string.
Description
This command is used to stop an EYE+ state.
Usage example
1 CALL *EYE_CONFIGURE("192.168.0.50", 7171, 1, 664)
2 CALL *EYE_STOP("recipe_edition")
3 CALL *EYE_STOP("camera_configuration")
4 CALL *EYE_STOP("handeye_calibration")
5 CALL *EYE_STOP("production")
6 '
7 CALL *EYE_START_PRODUCTION(12345)
8 '...
9 '
10 CALL *EYE_STOP("production")
11 CALL *EYE_CHECK_LAST_ERROR
12 IF EYELastErr% = 0 THEN
13 ' EYE+ is in ready state'
14 ENDIF
EYE_GET_PART
Returns
The returned part is stored in the point variable Pxxxx where xxxx is the point number you haven chosen while
calling the command EYE_CONFIGURE.
Only the components for X axis (A1), for Y axis (A2) and for RZ angle (A4 or A6) are overwritten in the position
Pxxxx. You have to define the other components of the point yourself according to your robot setup. These missing
components can be assigned by hand or by using the assignment operator LOCx in your program.
Note
If in EYE_CONFIGURE you have chosen a SCARA robot, the robot position is only defined with the following components: A1, A2, A3, A4.
And if you have chosen a 6-axis robot, the robot position is only defined with the following components: A1, A2, A3, A4, A5, A6.
Description
This command is used to request one part from EYE+. This is a blocking command, meaning it will keep going until it gets a response from EYE+.
Usage example
1 CALL *EYE_CONFIGURE("192.168.0.50", 7171, 1, 664)
2 CALL *EYE_START_PRODUCTION(12345)
3 '
4 ' Assign the other components of the part position to be reachable (6-axis robot in use)
5 ' Assign Z position
6 LOC3(P664) = 15.000
7 ' Assign RX position
8 LOC4(P664) = -180.000
9 ' Assign RY position
10 LOC5(P664) = 0.000
11 '
12 CALL *EYE_GET_PART
13 CALL *EYE_CHECK_LAST_ERROR
14 IF EYELastErr% = 0 THEN
15 ' Move to position
16 MOVE P,P664
17 ENDIF
18 CALL *EYE_STOP("production")
EYE_PREPARE_PART
Description
This command is used to request one part from EYE+. This command is not a blocking command. The part coordinates can be retrieved later with the EYE_GET_PART command.
Usage example
1 CALL *EYE_CONFIGURE("192.168.0.50", 7171, 1, 664)
2 CALL *EYE_START_PRODUCTION(12345)
3 '
4 ' Assign the other components of the part position to be reachable (6-axis robot in use)
5 ' Assign z position
6 LOC3(P664) = 15.000
7 ' Assign rx position
8 LOC4(P664) = -180.000
9 ' Assign ry position
10 LOC5(P664) = 0.000
11 '
12 CALL *EYE_PREPARE_PART
13 '
14 ' ...
15 '
16 CALL *EYE_GET_PART
17 CALL *EYE_CHECK_LAST_ERROR
18 IF EYELastErr% = 0 THEN
19 ' Move to position
20 MOVE P,P664
21 ENDIF
22 CALL *EYE_STOP("production")
EYE_RAW_COMMAND(command$, socket%)
Parameters
command$ - is the raw command to send to EYE+. This parameter must be a string.
socket% - is the socket number that will be used to send the command. The parameter must be an integer whose value is equal to 1 or 2.
Note
Socket 1 is related to the first client GP6 defined by the command EYE_CONFIGURE and socket 2 to the second client GP7.
Returns
The raw response of the command is stored in the global variable EYERawRes$.
Description
This function is used to send raw commands to EYE+. Refer to chapter Commands to know what kind of commands can be sent.
Warning
If you send the command EYE_RAW_COMMAND("set_parameter part_quantity 2", 1), the
EYE_GET_PART command will provide only the first part coordinates in the point Pxxxx. However, if
you use a EYE_RAW_COMMAND("get_part", 1) command, the string response will contain all the part coordinates.
Usage example
1 CALL *EYE_CONFIGURE("192.168.0.50", 7171, 1, 664)
2 CALL *EYE_RAW_COMMAND("start production 12345", 1)
3 IF EYERawRes = "200" THEN
4 ' EYE+ is in production
5 ENDIF
6 CALL *EYE_STOP("production")
EYE_CHECK_LAST_ERROR
Returns
The last error detected is stored in the variable EYELastErr%.
Description
This function is used to check if an error has occurred.
If no error has occurred, the output is equal to 0.
If an EYE+ error has occurred, the output is equal to one of the error codes listed in Error codes (error type
4xxor5xx).If a plugin error has occurred, the output is one of the following errors displayed in section Plugin errors (error type
6xx).
Once the error is returned as output from the function, the error is cleared internally (value set to 0).
Usage example
1 CALL *EYE_CONFIGURE("192.168.0.50", 7171, 1, 664)
2 CALL *EYE_GET_PART
3 CALL *EYE_CHECK_LAST_ERROR
4 IF EYELastErr% = 403 THEN
5 'Production subsystem has not been started
6 ENDIF
7 CALL *EYE_CHECK_LAST_ERROR
8 IF EYELastErr% = 0 THEN
9 'Now the error is cleared
10 ENDIF
11 CALL *EYE_STOP("production")