Warnung
Sie lesen eine alte Version dieser Dokumentation. Wenn Sie aktuelle Informationen wünschen, schauen Sie bitte unter 5.4 .Force take image
Das Szenario mit dem Befehl force_take_image wird verwendet, wenn Sie wissen, dass sich die Teile auf dem Asycube aufgrund externer Störungen bewegen werden. Die Störungen können während der Aufnahme oder Platzierung eines Teils oder einfach während einer Roboterbewegung auftreten.
Der Befehl force_take_image ist dann nützlich, um zu gewährleisten, dass die Koordinaten der Teile korrekt sind, indem ein weiteres Bild nach der bekannten Störung aufgenommen wird. Siehe Abb. 200 für eine unkomplizierte Integration mit einem get_part Befehl.
Bemerkung
Wenn der Parameter can_take_image auf false gesetzt ist, wird der Befehl force_take_image nicht ausgeführt.
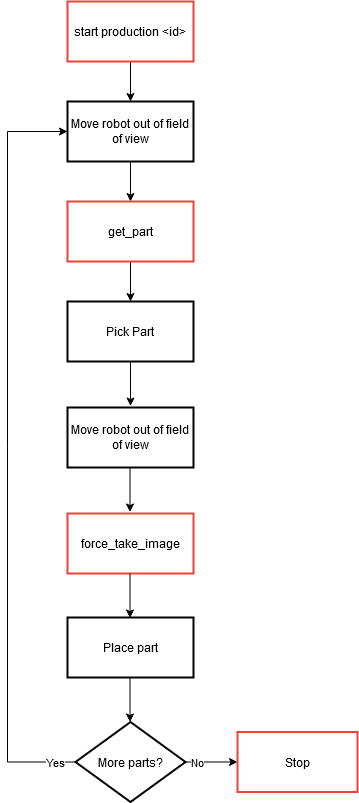
Abb. 200 force_take_image mit get_part: 2 Möglichkeiten
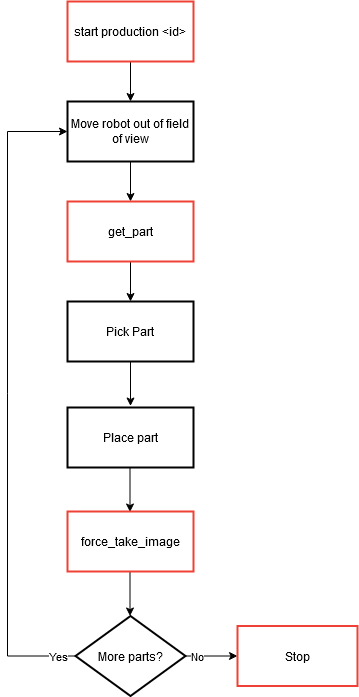
Das linke Szenario in Abb. 200 folgt diesen Schritten:
[Roboter aus dem Sichtfeld bewegen]: Bevor Sie den Befehl get_part ausführen, müssen Sie sicherstellen, dass nichts die Sicht der Kamera verdeckt.
[get_part]: Führen Sie den Befehl get_part aus, dies wird entweder den Asycube vibrieren lassen und ein Bild aufnehmen, oder Ihnen direkt die Koordinaten eines Teils senden.
[Teil entnehmen]: Entnehmen Sie das Teil. Wenn das Teil entnommen wird, berührt der Roboter den Asycube und bewegt die übrigen Teile.
[force_take_image]: Zwingt EYE+ zur Aufnahme eines Bildes, um die bereits im Speicher befindlichen Koordinaten mit ihrer neuen Position anzupassen.
Beginnen Sie von neuem bei Schritt 1. Der Zyklus stoppt, wenn EYE+ den Befehl stop production erhält.