Warnung
Sie lesen eine alte Version dieser Dokumentation. Wenn Sie aktuelle Informationen wünschen, schauen Sie bitte unter 5.4 .Part quantity = <n>
Der Parameter part_quantity wird verwendet, um EYE+ aufzufordern, nach mehreren Teilen gleichzeitig zu suchen. Das bedeutet, dass jedes Mal, wenn EYE+ ein Bild aufnimmt, nach mindestens <n> Teilen auf dem Bild gesucht wird. Wenn diese Teile nicht gefunden werden, werden keine Koordinaten gesendet. Neue Vibrationen werden gestartet und ein neues Bild aufgenommen, bis diese <n> Teile gefunden werden.
Dieser Parameter beeinflusst die Funktion der Befehle get_part und prepare_part.
Warnung
Sobald EYE+ die n Koordinaten an den Client sendet, wird davon ausgegangen, dass im nächsten Schritt alle diese Teile entnommen werden. Dies bedeutet, dass die Koordinaten der Teile dann aus der Liste der guten Kandidaten gelöscht werden.
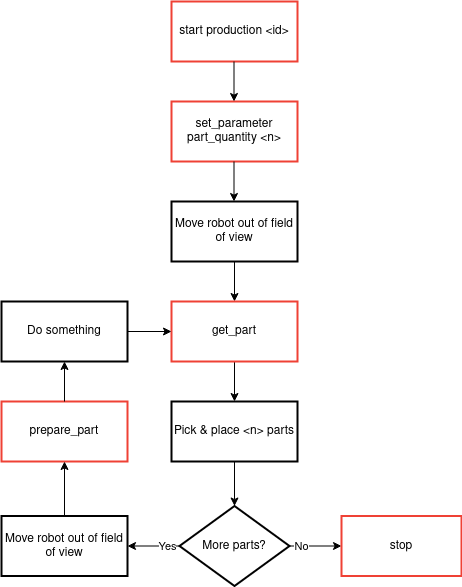
Abb. 200 Produktionsszenario mit prepare_part, get_part und part_quantity = <n>
[set_parameter part_quantity <n>]: Setzen Sie den Parameter part_quantity auf <n>.
[Roboter aus dem Sichtfeld bewegen]: Bevor Sie den Befehl get_part ausführen, müssen Sie sicherstellen, dass nichts die Sicht der Kamera verdeckt.
[get_part]: Führen Sie den Befehl get_part aus. Dies wird entweder den Asycube vibrieren lassen und ein Bild aufnehmen oder direkt die Koordinaten eines Teils senden. Die Vibration des Asycubes und die Bildanalyse wird erst beendet, wenn <n> oder mehr Teile gefunden wurden.
[<n> Teile entnehmen & platzieren]: Entnehmen und platzieren Sie die <n> ersten Teile.
[Roboter aus dem Sichtfeld bewegen]: Bevor Sie den Befehl prepare_part ausführen, müssen Sie sicherstellen, dass nichts die Sicht der Kamera verdeckt.
[prepare_part]: Geben Sie den Befehl prepare_part ein, dies wird entweder den Asycube vibrieren lassen und ein Bild aufnehmen, oder es wird nichts ausgeführt, wenn die <n> Teile bereits gefunden und im Speicher abgelegt wurden.
[Etwas tun]: Führen Sie mit Ihrem Roboter die notwendigen Aktionen durch. Diese Aktion des Roboters läuft parallel zu Schritt 5. Achten Sie deshalb darauf, dass der Roboter während dieser Aktion nicht in das Sichtfeld der Kamera gerät.
Beginnen Sie von neuem bei Schritt 1. Der Zyklus stoppt, wenn EYE+ den Befehl stop production erhält.