Warnung
Sie lesen eine alte Version dieser Dokumentation. Wenn Sie aktuelle Informationen wünschen, schauen Sie bitte unter 5.4 .6.2 Entnahmegrenzen
Legen Sie die Entnahmegrenzen an den Rändern des Asycubes fest. Damit wird vermieden, dass der Roboter ein Teil zu nahe an den Rändern des Asycubes entnimmt und mit diesen kollidiert.
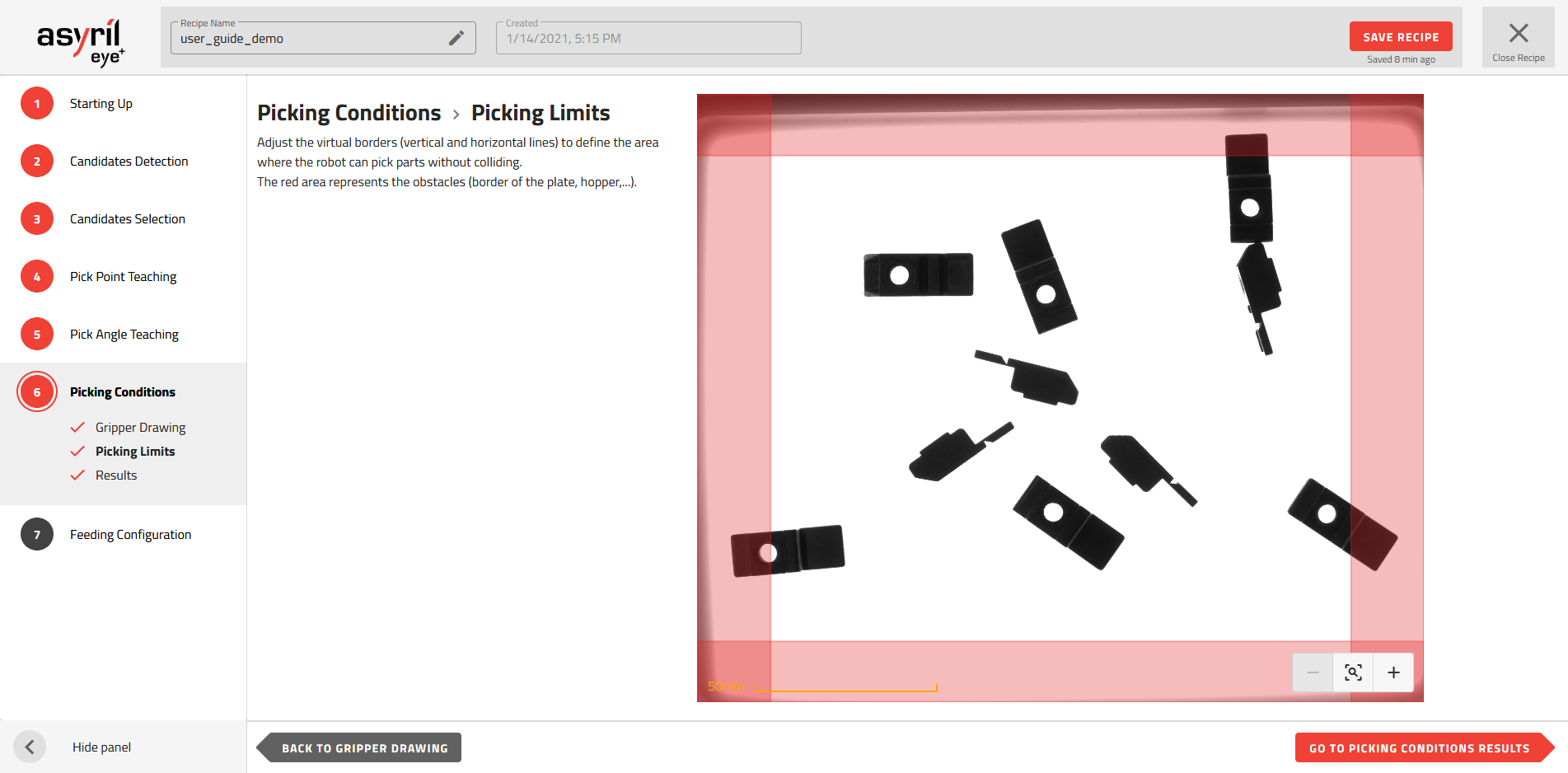
Abb. 130 Entnahmebedingungen - Entnahmegrenzen
Wenn der Freiraum in Konflikt mit den Entnahmegrenzen ist, wird das Teil abgelehnt (Abb. 131).

Abb. 131 Abgelehntes Teil: Greifer-Freiraum überschneidet sich mit den Entnahmegrenzen
Bemerkung
Wenn sich ein Kandidat innerhalb der Entnahmegrenzen befindet, der Freiraum aber ausserhalb der Entnahmegrenzen liegt, wird der Kandidat akzeptiert.
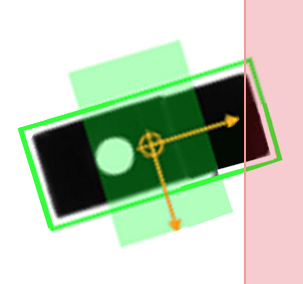
Abb. 132 Akzeptiertes Teil: Teil innerhalb der Entnahmegrenzen