Avertissement
Vous lisez une ancienne version de cette documentation. Si vous souhaitez obtenir des informations actualisées, veuillez consulter 5.4 .Qu’effectue la calibration de la vision ?
Quelles sont les corrections apportées à l’aide du damier ?
Correction de la distorsion de l’image: Une fois la calibration effectuée, chaque fois qu’une image est acquise, la distorsion sera automatiquement corrigée.
Remarque
Pour plus d’informations sur ce qu’est la distorsion et comment elle est corrigée, reportez-vous à la section Correction de la distorsion.
Définition de la région d’intérêt (ROI): La ROI (Region of interest) est la région résiduelle des images qui sera utilisée ultérieurement pour toute analyse d’image. C’est un moyen de rejeter les régions d’images qui ne sont pas utilisées pour l’analyse d’images :
Les côtés gauche et droit des images comprennent toujours des régions situées en dehors de l’Asycube.
Si dans le carde de votre intégration la même partie de l’image est toujours cachée par un autre dispositif (trémie, robot, éclairages, …), cette partie sera automatiquement rejetée de la ROI.
Important
Pour cette raison, assurez-vous que l’intégration du système que vous utilisez pour la calibration est la même que celle que vous utiliserez pendant la production afin de garantir le rejet des régions sans intérêt de l’image.
Ne démontez pas votre trémie, votre robot, votre éclairage (etc…) pour obtenir un meilleur résultat de calibrage ! Cela pourrait entraîner des erreurs d’analyse d’image lors de l’édition des recettes ou pendant la production.
Sur l’image à la Fig. 160, la ROI est représentée par le rectangle vert entourant le damier.
Détermination de l’échelle pixel-millimètre ou pixel-pouce : L’origine et l’orientation du système de coordonnées de la vision ne changent pas (Fig. 223). Avant la calibration de la vision, le système de coordonnées va de 0 à 3072px sur l’axe x et de 0 à 2048px sur l’axe y. Après la calibration de la vision, le système de coordonnées va de 0 à la largeur de l’image en millimètres/pouces et de 0 à la hauteur de l’image en millimètres/pouces (Tableau 34).
Tableau 34 Changement des coordonnées de la vision Avant la calibration
Après la calibration
Référence
X
Y
X
Y
Point 1
0
0
0
0
Point 2
3072px
0
Largeur
0
Point 3
0
2048px
0
Hauteur
Point 4
3072px
2048px
Largeur
Hauteur
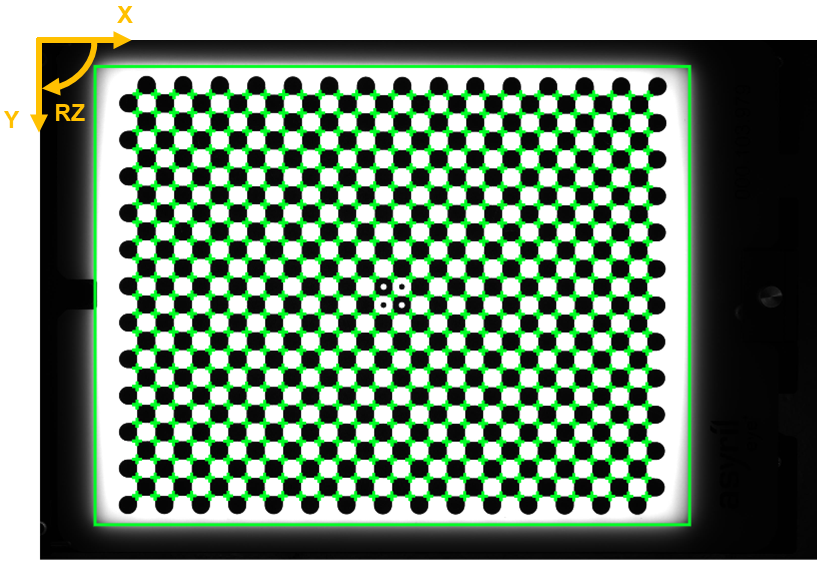
Fig. 223 Système de coordonnées de la vision
Correction de la distorsion
L’objectif principal de la calibration de la vision est la correction de la distorsion.
La distorsion est une aberration optique monochromatique qui se traduit par une variation de grossissement de l’image pour une distance de travail fixe. Une image en damier soumise à une distorsion produira des lignes courbes au lieu de lignes droites (damier gauche à la Fig. 224).
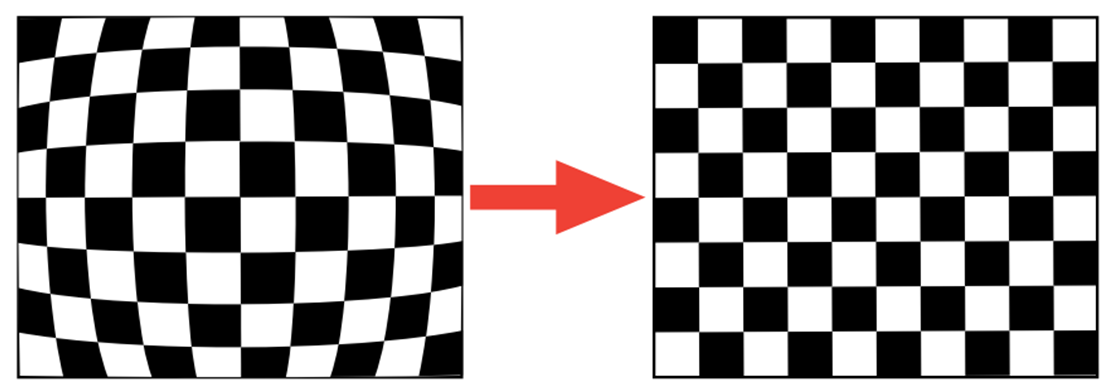
Fig. 224 Correction de la distorsion optique (à gauche : avant la calibration, à droite : après la calibration)
Techniquement, la distorsion ne réduit pas l’information contenue dans l’image, car elle ne fait que déplacer l’information de façon géométrique. Cela signifie que la distorsion peut être calculée de manière effective à partir d’une image et donc corrigée sans perdre beaucoup d’information.
Un modèle de distorsion est déterminé en recherchant les paramètres de distorsion et les paramètres des propriétés intrinsèques et extrinsèques de la caméra pour ajuster les lignes du damier à l’image déformée. Le modèle tente de reconstruire les lignes courbes. Une fois ces paramètres trouvés, la transformation de correction de la distorsion peut être appliquée à l’image déformée.
Remarque
La transformation de correction de la distorsion est une opération mathématique basée sur les paramètres de distorsion et appliquée à l’image. Elle sera appliquée à chaque image acquise avant d’effectuer toute analyse d’image.
La Fig. 160 montre une image du damier avant (à gauche) et après (à droite) la correction de la distorsion. Les coins du damier détectés sont représentés par des croix vertes.
Erreur RMS
Dans l’étape 9. Résultats de la configuration de la caméra, nous vous fournissons la racine de l’erreur quadratique moyenne (Root mean square RMS error) de la reconstruction de la distorsion. Il s’agit de l’erreur moyenne entre le damier attendu et le damier résultant de la reconstruction de la distorsion. Plus l’erreur de reprojection est proche de zéro, plus les paramètres que nous avons trouvés sont précis.
Avertissement
Si l’erreur RMS est supérieure à 1, la correction n’est pas applicable.
Remarque
Le damier est également utilisé pour déterminer l’échelle pixel-millimètre ou pixel-pouce présentée dans les résultats à l’étape 9.
Correction de la parallaxe
Grâce à la hauteur de la caméra précisée à l’étape 7 (la distance de travail), le système sera en mesure de corriger la parallaxe lorsque vous fournirez la hauteur de la pièce lors de l’édition de la recette.
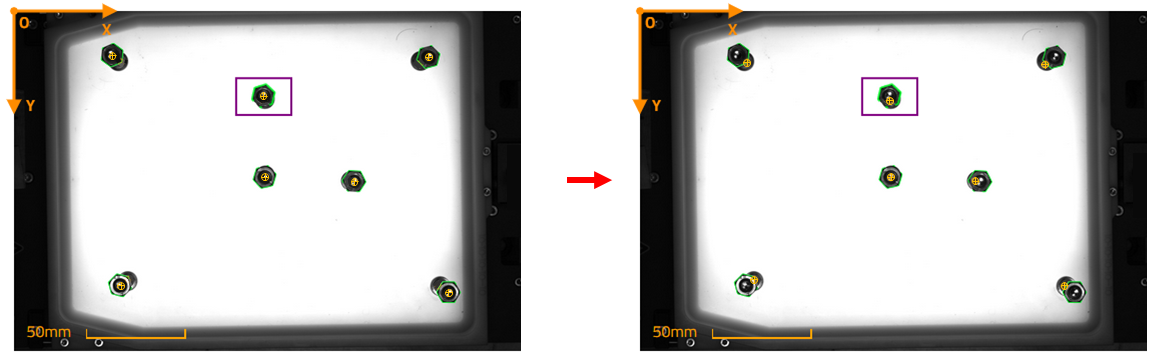
Fig. 225 Gauche : Avant la correction de la parallaxe ; Droite : Après la correction de la parallaxe ; La cible jaune correspond au point de prise
La parallaxe est une différence dans la position apparente d’un objet vu selon deux lignes de visée différentes. Pour les applications EYE+, l’image 2D des pièces du point de vue de la caméra peut introduire une perspective entre la surface supérieure et la surface inférieure des pièces si les pièces sont hautes et éloignées du centre de l’asycube. La surface supérieure est décalée par rapport à la surface inférieure. Ce phénomène introduit un décalage des coordonnées du point de prise. Plus la pièce est haute, plus la parallaxe est forte.
Dans la situation présentée à la Fig. 226, la parallaxe produit un déplacement vers la droite de la surface supérieure du cylindre par rapport à la base du cylindre (cylindre droit) du point de vue de la caméra. La variation en Y due à la parallaxe correspond à la distance e entre le point jaune (position réelle) et le point rouge (position détectée par EYE+ : cette position est décalée en raison de la perspective). Le point jaune correspond à la position corrigée du centre du cylindre projeté sur le plan de la caméra (ligne noire horizontale en pointillés).
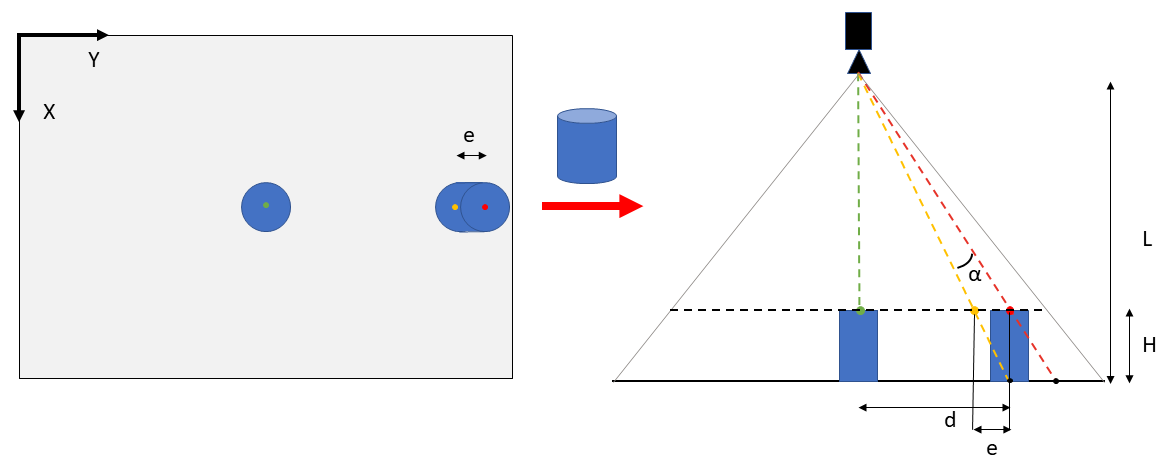
Fig. 226 Correction de la parallaxe d’un cylindre (à gauche : vue de dessus, à droite : vue de côté). Point jaune : position réelle du point de prise ; Point rouge : position détectée par EYE+ sans correction de la parallaxe.
Conseil
Essayez d’imaginer l’image redimensionnée du plan inférieur (ligne noire horizontale) projetée sur le plan de la caméra (ligne noire pointillée). L’image est redimensionnée par le facteur R pour rester dans le cône de vision.
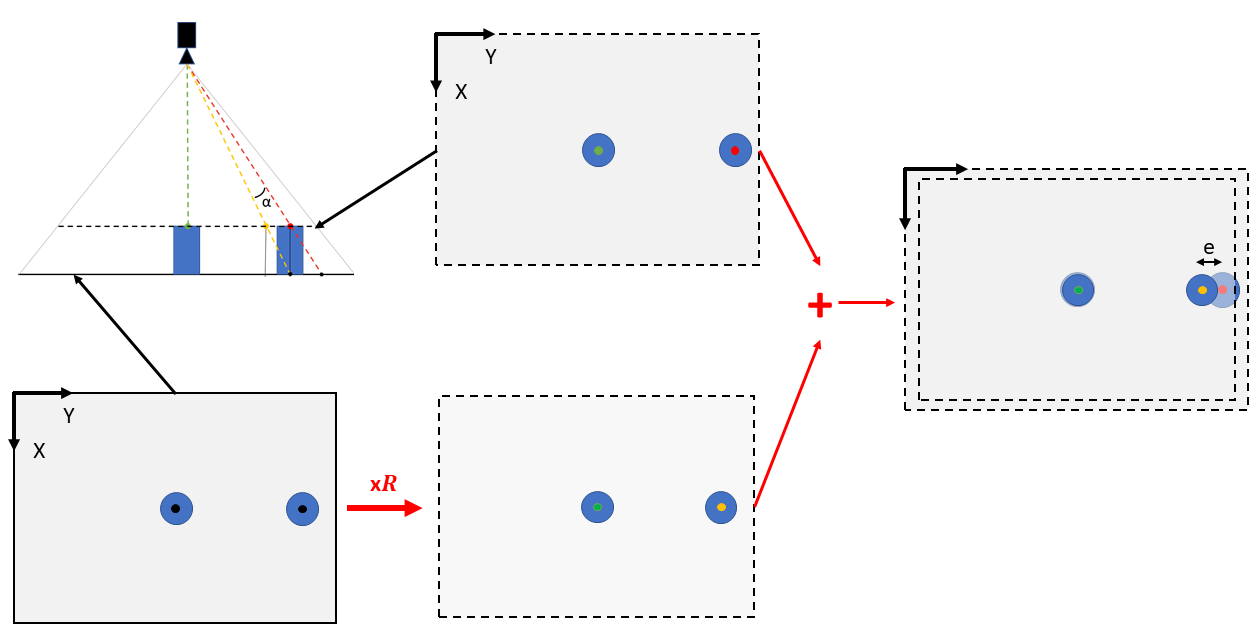
Fig. 227 Projection du plan inférieur (ligne noire horizontale) sur le plan de la caméra (ligne noire horizontale en pointillés) vue du haut. La projection est redimensionnée par le rapport R.
EYE+ corrige la parallaxe induite par la variation de la position des pièces sur la surface de l’Asycube en ajoutant un décalage aux coordonnées X et Y de la pièce en fonction de sa position sur la plateforme de l’Asycube. Une pièce située sur le bord de la plateforme aura un décalage plus important qu’une pièce située au centre. Pour calculer ces décalages, le système doit connaître la hauteur de la pièce et la hauteur de la caméra.
Remarque
La correction de la parallaxe n’est pas effectuée lors de la configuration de la caméra mais plus tard, lorsque vous fournirez la hauteur de la pièce au système pour le calcul des coordonnées.