警告
現在、このドキュメントは古いバージョンをご覧いただいています。 最新の情報をご希望の場合は、下記をご参照してください 5.4 .5.ピック角度の学習(ティーチング)
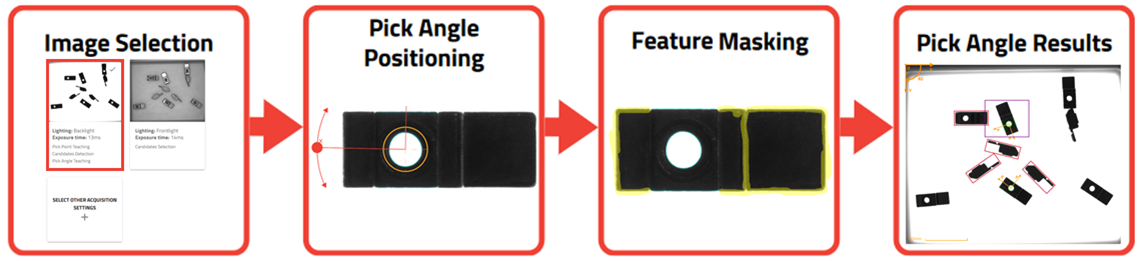
図 101 ピック角度ティーチングの概要
部品の形状によっては、ロボットにピックさせるために、部品の角度を知る必要があります。このステップの目的は、システムに新しい参照部品(同じ参照候補をベースとした部品)を学習させ、この参照部品の相対的な方向を指定することです。
参照部品は、前のステップで使用した同じ参照候補から検出された特徴をもとに定義します。この参照特徴から、その部品のX軸とY軸の方向により、部品の向きを定義します。
部品の方向角度は、 get_part が呼ばれた時に EYE+ から送られて来る候補の RZ 角度を決定するために使います。
注釈
部品にピック角度の設定が必要ない場合は、オプションでこのステップをスキップすることができます。このステップをスキップするには、 をクリックしてください。
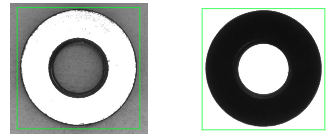
図 102 ワッシャーにはピック角度が不要(フロントライト:左、バックライト:右)