警告
あなたはこのドキュメントの古いバージョンを読んでいます。 最新の情報を知りたい場合は、以下を参照してください 5.4 .5.ピック角度ティーチング
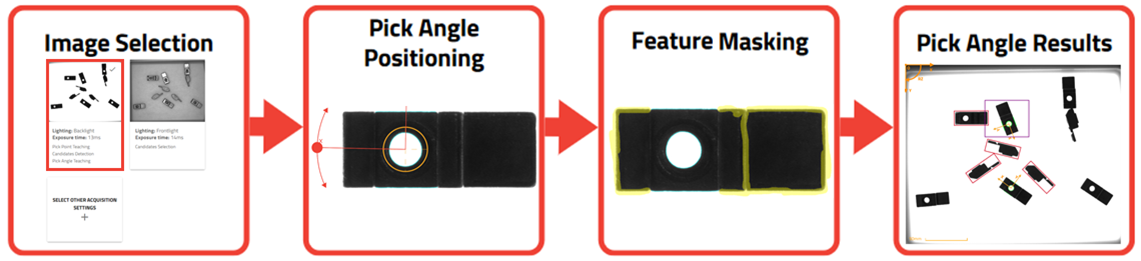
図 89 ピック角度ティーチングの概要
部品の形状によっては、ロボットがピックするために、部品の角度を知る必要がある場合があります。このステップの目的は、システムに新しい参照モデル(同じ参照候補に対するモデル)を教示し、このモデルに対する部品の相対的な角度を指定することです。
参照モデルは、前のステップと同じ候補に検出されるフィーチャーによって定義されます。この参照フィーチャーを使って、部品のX軸とY軸の向きにより、部品の向きが定義されます。
部品の向きの角度は、 get_part が呼ばれた時に EYE+ から送られて来る候補の RZ 角度を定義するために使われます。
注
このステップは、部品にピック角度の設定が必要ない場合は、オプションでスキップすることができます。このステップをスキップするには、 をクリックしてください。
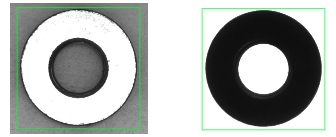
図 90 ワッシャーにはピック角度が不要(フロントライト:左、バックライト:右)