Warnung
Sie lesen eine alte Version dieser Dokumentation. Wenn Sie aktuelle Informationen wünschen, schauen Sie bitte unter 5.4 .Hand-Augen-Kalibrierungsassistent
Dieser Assistent führt Sie durch die Hand-Augen-Kalibrierung.
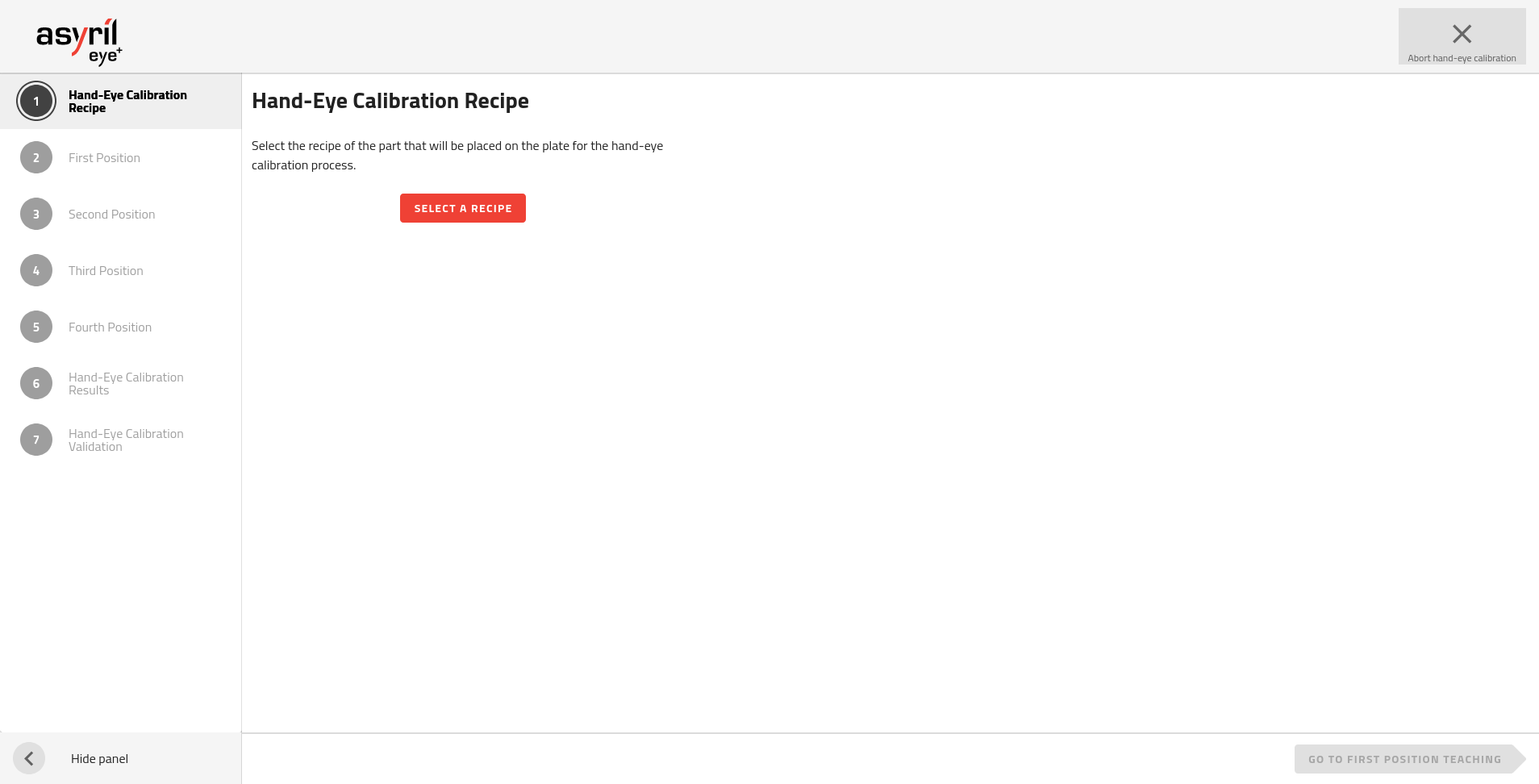
Abb. 209 Hand-Augen-Kalibrierungsassistent
Die Kalibrierung erfolgt in 7 Schritten.
Bemerkung
Im Abschnitt Hand-Augen-Kalibrierung - Gute Praktiken finden Sie Informationen darüber, wie Sie das Koordinatensystem des Roboters platzieren und die Genauigkeit der Hand-Augen-Kalibrierung erhöhen können.
1. Rezept für die Hand-Augen-Kalibrierung
Sie müssen ein Rezept auswählen, das dann für die Hand-Augen-Kalibrierung verwendet wird. Die erforderlichen Rezeptparameter werden in das Rezept für die Hand-Augen-Kalibrierung kopiert. Es besteht keine dynamische Verknüpfung zwischen dem ausgewählten Rezept und dem Rezept für die Hand-Augen-Kalibrierung.
Bemerkung
Wenn Sie das Rezept für die Hand-Augen-Kalibrierung ändern müssen, müssen Sie dieses Rezept in ändern und dann die Hand-Augen-Kalibrierung erneut starten, wobei Sie das geänderte Rezept auswählen.
Bemerkung
Wenn Sie ein Multi-feeding-Rezept verwenden möchten (vgl. Multi-feeding), muss der Kalibrierungsprozess nur mit dem Teil A durchgeführt werden. Für diese Funktion ist die Version 2.1 oder höher von EYE+ erforderlich.
Sie können entweder das Rezept des Teils auswählen, das Sie in der Produktion entnehmen möchten, oder Sie können ein bestimmtes Teil auswählen, das nur für die genaue Kalibrierung verwendet wird (siehe Abschnitt Verwendung eines für die Hand-Augen-Kalibrierung bestimmten Teils).
Wichtig
Sie müssen jedoch in jedem Fall die Produktionsplatte verwenden, die Sie in der Produktion verwenden werden. Wenn Sie das nicht tun, könnten die Koordinaten der Teile ungenau sein.
Nachdem Sie das gewünschte Rezept ausgewählt haben, werden die folgenden Informationen angezeigt:
Name des Rezepts
Höhe des Teils
Ein Bild des gewählten Teils
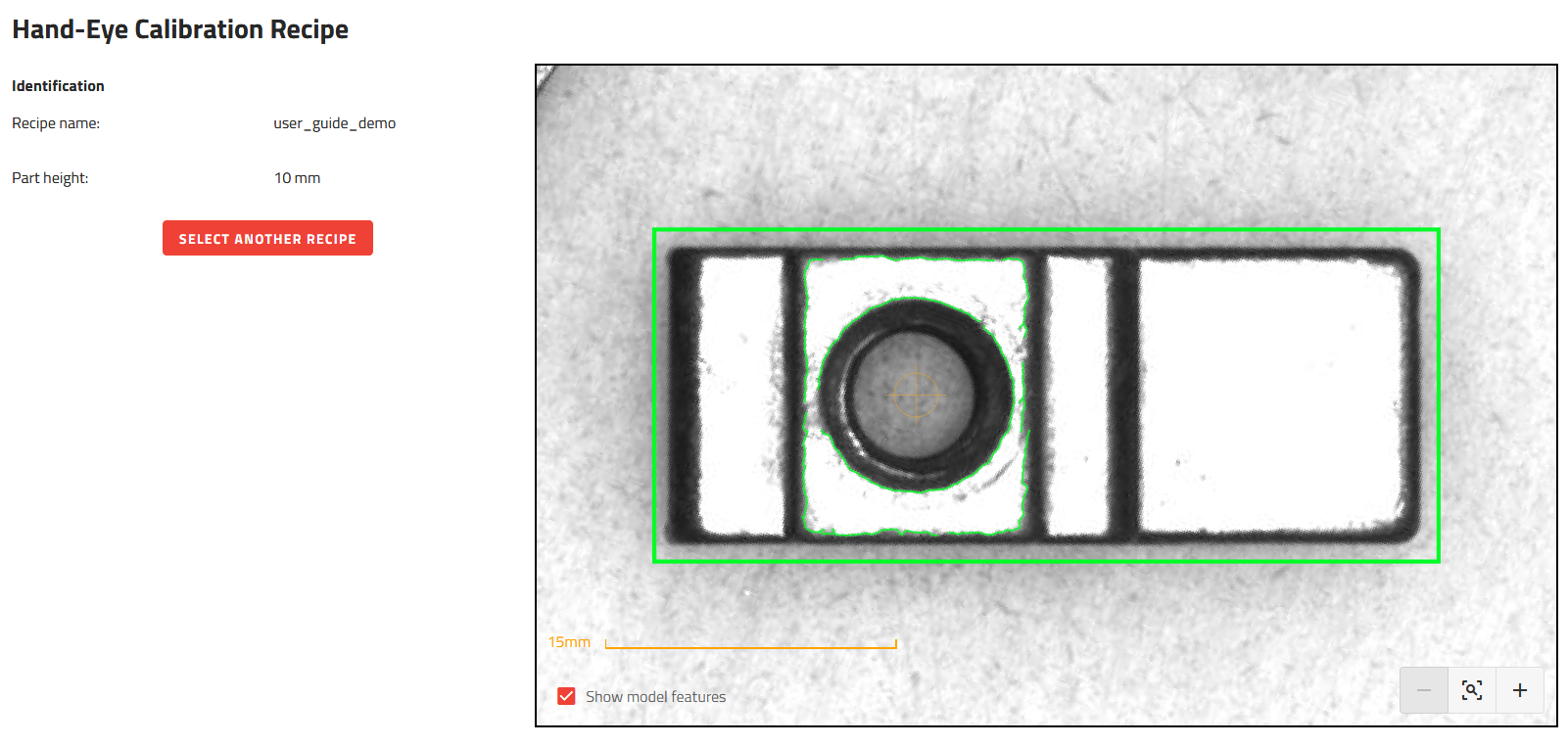
Abb. 210 Rezept für die Hand-Augen-Kalibrierung
2. Erste Position
Dieser Schritt setzt sich aus 5 Teilschritten zusammen.
a. Greifer vorbereiten
Es gibt zwei Möglichkeiten, den Greifer vorzubereiten:
Die erste Möglichkeit besteht darin, das Teil direkt in den Greifer zu platzieren. Stellen Sie sicher, dass das Teil im Greifer so positioniert ist, wie es in der Produktion positioniert werden soll. Versuchen Sie, das Teil so genau wie möglich im Greifer zu platzieren. Der Werkzeug-Mittelpunkt (Tool center point TCP) muss auf der Entnahmeposition platziert werden, die Sie im Rezept definiert haben.
Wichtig
Wenn das Teil nicht für alle vier Positionierungsschritte (2. Erste Position, 3. Zweite Position, 4. Dritte Position, 5. Vierte Position) die exakt gleiche Position im Greifer hat, führt dies zu einer Verringerung der Genauigkeit Ihrer Kalibrierung, da die von der Vision erkannte Entnahmeposition nicht perfekt mit den von Ihnen angegebenen Roboterkoordinaten übereinstimmt.
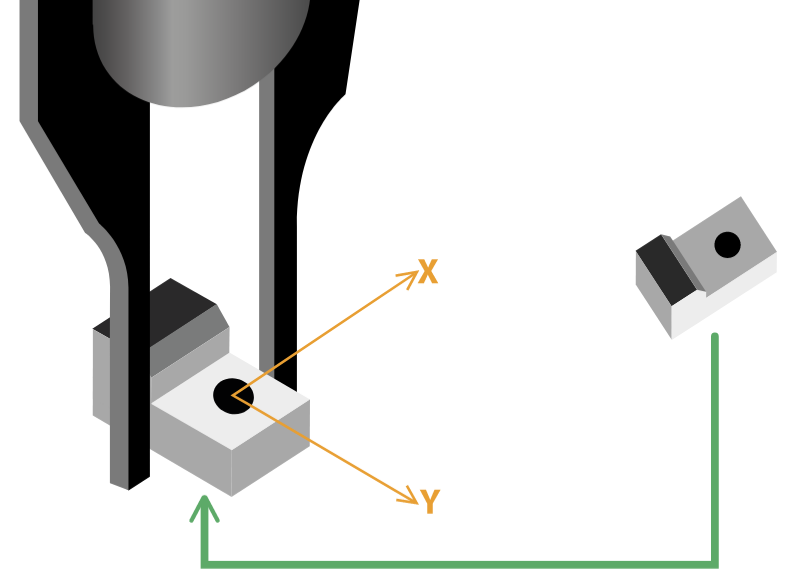
Abb. 211 Vorbereiten des Greifers: erste Möglichkeit
Die zweite Möglichkeit besteht darin, das Teil direkt auf die Platte zu legen, ohne den Greifer zu verwenden. Das Teil muss so ausgerichtet werden, dass es vom Greifer aufgenommen werden kann. Der Vorteil dabei ist, dass der Greifer im nächsten Schritt das Teil nicht berühren muss. Da die Hand-Augen-Kalibrierung nur die X- und Y-Positionen verarbeitet, kann der TCP oberhalb der Entnahmeposition platziert werden, ohne das Teil zu berühren.
b. Roboter bewegen
Bringen Sie den Roboter in die richtige Position. Es gibt zwei Möglichkeiten, dies zu tun:
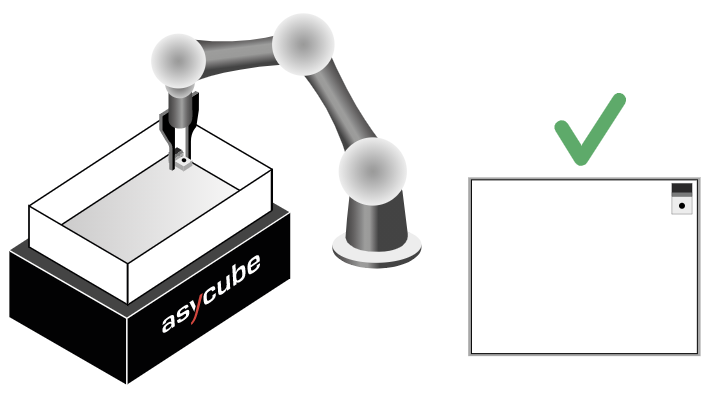
Abb. 212 Fahren Sie den Roboter in die erste Position
Die erste Möglichkeit besteht darin, den Greifer (der das Teil hält) in eine der vier Ecken des Asycubes zu fahren. Das Teil muss die Oberfläche perfekt berühren und muss vom Greifer auf der Entnahmeposition immer gut gehalten werden.
Die zweite Möglichkeit ist, den TCP über das bereits auf dem Asycube platzierte Teil zu positionieren. Das Teil muss zunächst in einer beliebigen der vier Ecken des Asycubes platziert werden.
Wichtig
Der Greifer darf den Rand des Asycubes nicht berühren.
Bemerkung
Um die Genauigkeit der Kalibrierung zu erhöhen sollten Sie darauf achten, dass die vier Positionen so weit wie möglich auseinander liegen.
c. Roboterkoordinaten
Geben Sie die Roboterkoordinaten des Greifers ein. Die Koordinaten müssen innerhalb des von Ihnen gewählten Koordinatensystems des Roboters liegen (Roboterkoordinatensystem (RCF)).
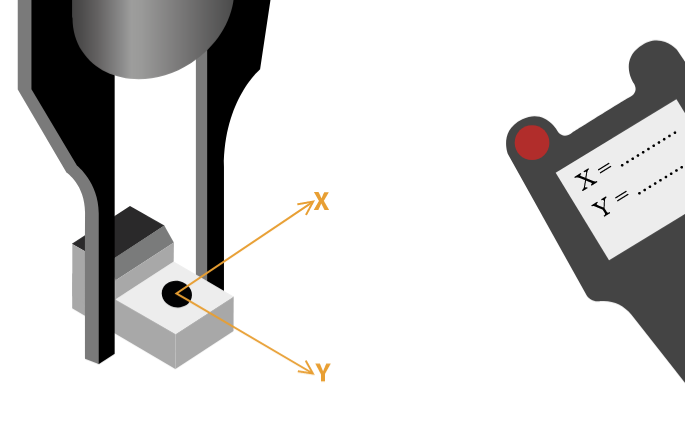
Abb. 213 Geben Sie die Roboterkoordinaten ein
Bemerkung
Geben Sie die Roboterkoordinaten in der Masseinheit Ihres Roboters ein. Einige Roboter arbeiten in Metern/Zoll, andere in Millimetern…
d. Roboter entfernen
Geben Sie das Teil frei (falls erforderlich) und entfernen Sie den Roboter aus dem Sichtfeld der Kamera.
Abb. 214 Entfernen Sie den Roboter aus dem Sichtfeld der Kamera
Wichtig
Achten Sie darauf, das Teil nicht zu bewegen, wenn Sie den Roboter aus dem Sichtfeld bewegen. Dies würde zu einer Verringerung der Genauigkeit Ihrer Kalibrierung führen.
e. Bild aufnehmen
Machen Sie ein Bild des Teils auf dem Asycube. EYE+ leitet die Koordinaten des Teils im Vision-Koordinatensystem ab.
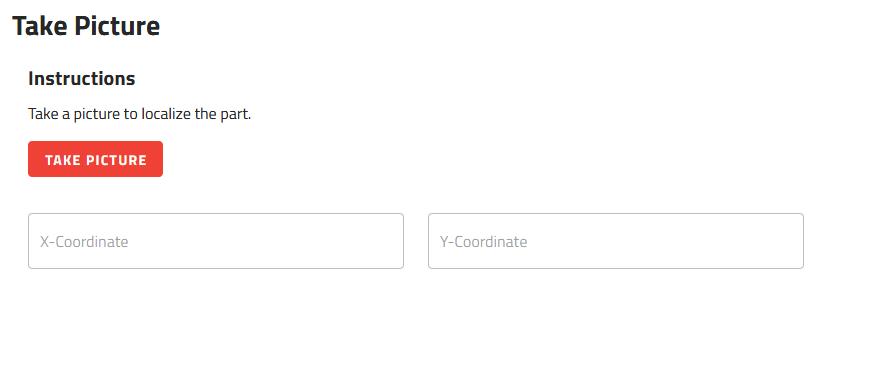
Abb. 215 Nehmen Sie ein Bild vom Teil auf
Bemerkung
Wenn EYE+ das Teil nicht gefunden hat, wiederholen Sie diesen Schritt indem Sie das Teil anders platzieren. Wenn das immer noch nicht funktioniert, überprüfen Sie Ihr Rezept.
3. Zweite Position
Für diesen Schritt wird derselbe Vorgang angewendet, der bereits im Abschnitt 2. Erste Position vorgestellt wurde. Das Teil muss in einer anderen Ecke platziert werden als bei der ersten Positionierung (Abb. 216).
Abb. 216 Fahren Sie den Roboter in die zweite Position
4. Dritte Position
Für diesen Schritt wird derselbe Vorgang angewendet, der bereits im Abschnitt 2. Erste Position vorgestellt wurde. Das Teil muss in einer anderen Ecke platziert werden als bei der ersten und zweiten Positionierung (Abb. 217).
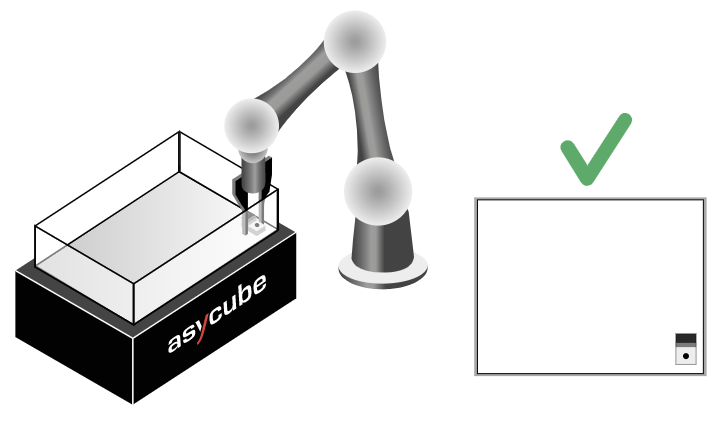
Abb. 217 Fahren Sie den Roboter in die dritte Position
5. Vierte Position
Für diesen Schritt wird derselbe Vorgang angewendet, der bereits im Abschnitt 2. Erste Position vorgestellt wurde. Das Teil muss in einer anderen Ecke platziert werden als bei der ersten, zweiten und dritten Positionierung (Abb. 218).
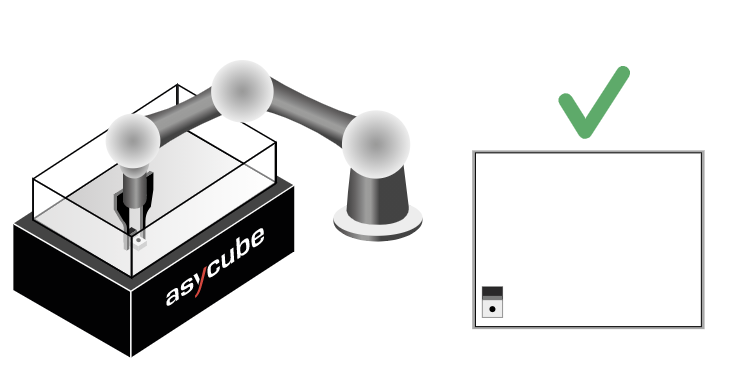
Abb. 218 Fahren Sie den Roboter in die vierte Position
6. Ergebnisse der Hand-Augen-Kalibrierung
Sie können nun das Ergebnis der Hand-Augen-Kalibrierung in der angezeigten Tabelle (Abb. 219) sehen. Diese fasst alle Koordinaten des Teils in den Koordinatensystemen der Vision und des Roboters zusammen. Sie zeigt auch die Genauigkeit Ihrer Hand-Augen-Kalibrierung an.
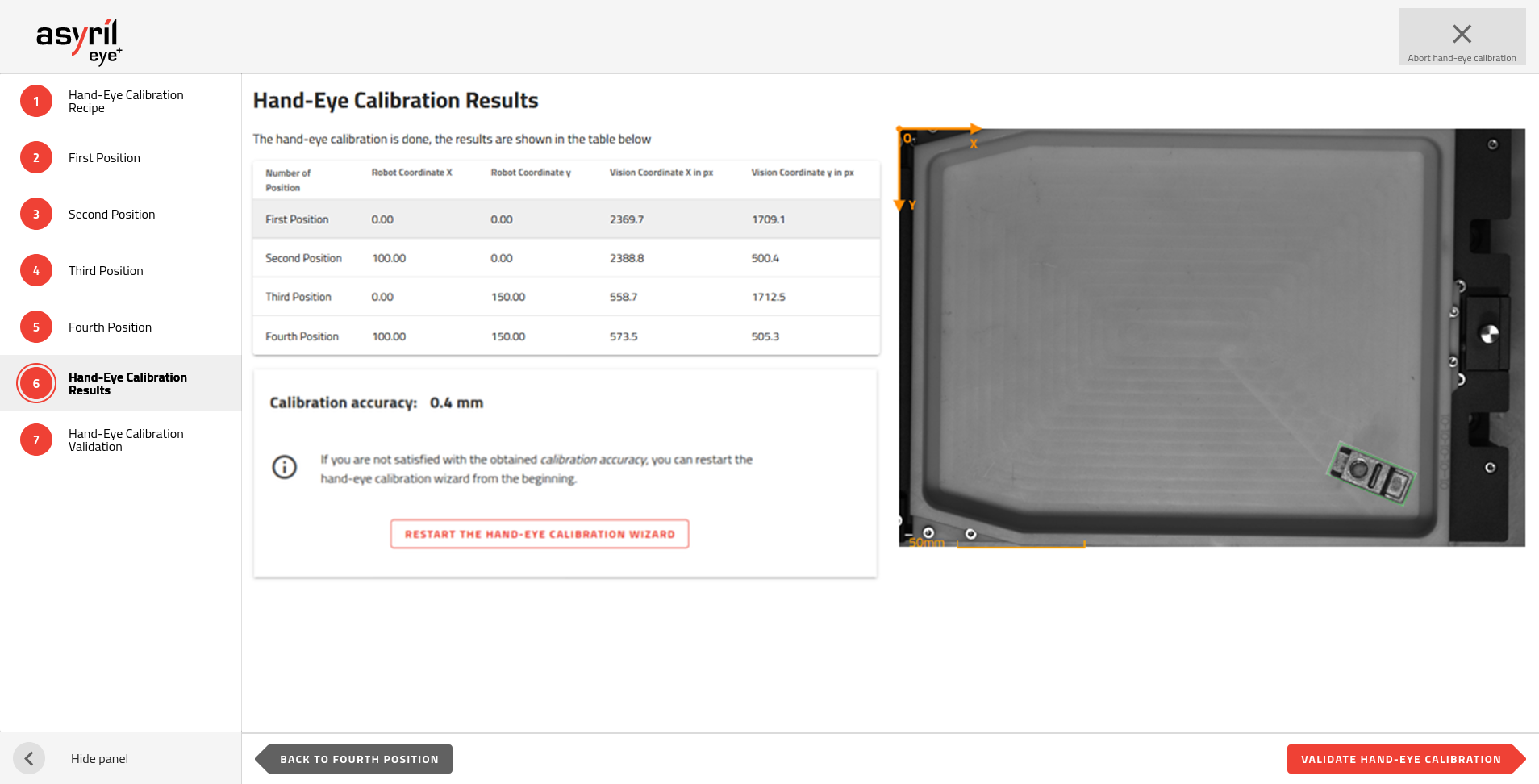
Abb. 219 Ergebnisse der Hand-Augen-Kalibrierung
Die Genauigkeit der Kalibrierung informiert Sie über die Qualität der Hand-Augen-Kalibrierung. Wenn Sie mit dieser Genauigkeit zufrieden sind, können Sie mit dem letzten Schritt fortfahren, in dem Sie die Kalibrierung validieren können.
Wenn nicht, empfehlen wir, die Hand-Augen-Kalibrierung erneut durchzuführen. Lesen Sie den Abschnitt Wie kann ich die Genauigkeit der Hand-Augen-Kalibrierung verbessern?, um mehr über die Erhöhung der Genauigkeit zu erfahren.
7. Validierung der Hand-Augen-Kalibrierung
In diesem Schritt können Sie die Hand-Augen-Kalibrierung validieren, indem Sie ein manuelles Pick-and-Place durchführen.
Platzieren Sie ein Teil irgendwo auf der Platte, z. B. in der Nähe der Mitte, und klicken Sie auf . Die in der Tabelle angezeigten Koordinaten entsprechen dem Koordinatensystem des Roboters.
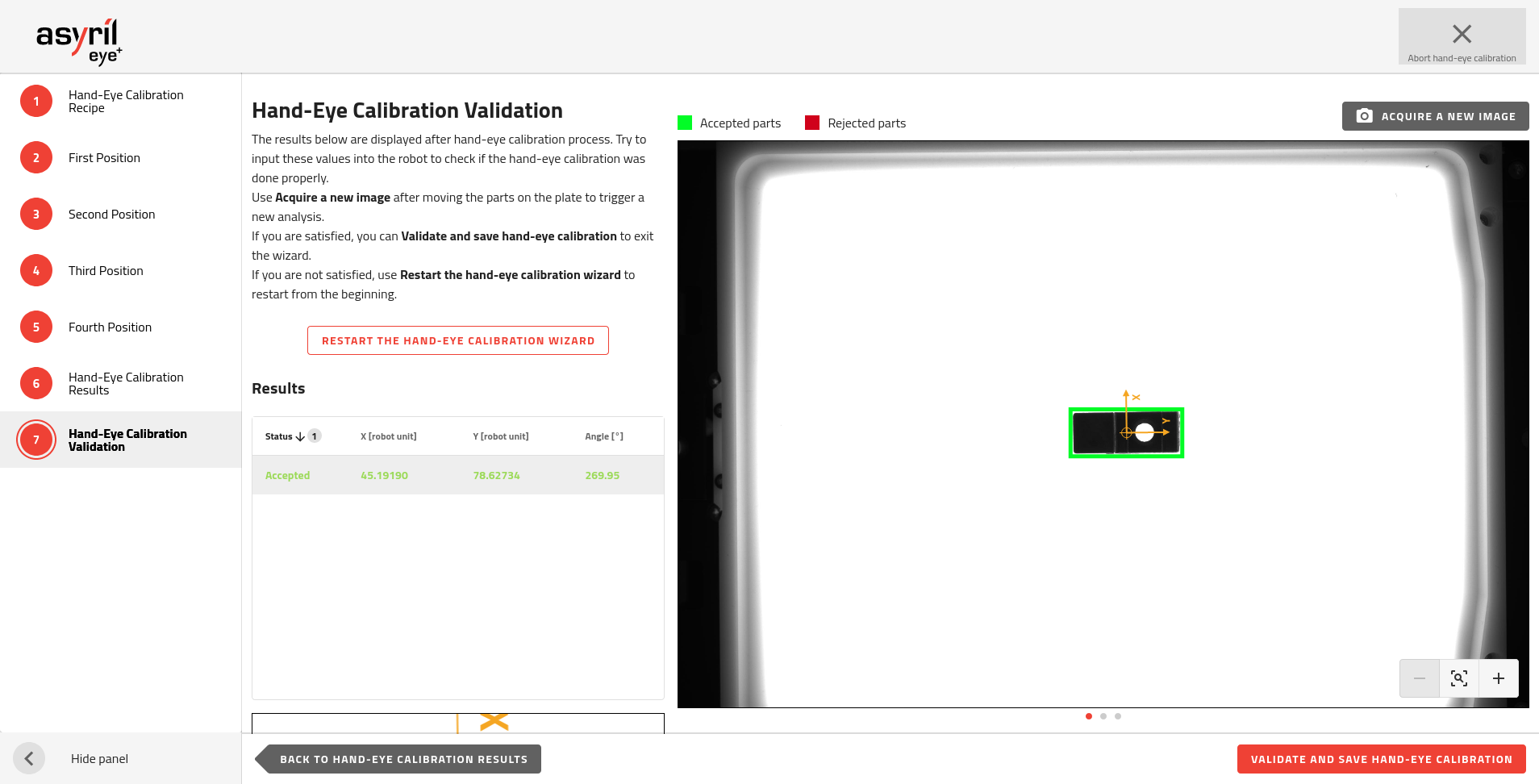
Abb. 220 Validierung der Hand-Augen-Kalibrierung mit einem erkannten Teil
Bewegen Sie dann den Roboter zu den angegebenen Koordinaten und bestätigen Sie, dass Sie das Teil entnehmen können. Wenn das in Ordnung ist, können Sie den Assistenten verlassen, indem Sie auf klicken.
Wenn nicht, empfehlen wir, die Hand-Augen-Kalibrierung erneut durchzuführen. Lesen Sie den Abschnitt Wie kann ich die Genauigkeit der Hand-Augen-Kalibrierung verbessern?, um mehr über die Erhöhung der Genauigkeit zu erfahren.
Bemerkung
Der Validierungsschritt ist optional. Wir empfehlen jedoch, diesen Schritt durchzuführen, um zu überprüfen, ob die Hand-Augen-Kalibrierung korrekt durchgeführt wurde.
Bemerkung
Für weitere Informationen zur Hand-Augen-Kalibrierung lesen Sie bitte den Abschnitt Was ist eine Hand-Augen-Kalibrierung?.
Die von EYE+ gesendeten Koordinaten werden nun automatisch im Koordinatensystem ihres Roboters (RCF) übertragen.
Wichtig
EYE+ übersetzt auch den RZ-Winkel in das Roboterkoordinatensystem. EYE+ berechnet einen Offset-Winkel zwischen der X-Achse der Vision und der X-Achse des Roboterkoordinatensystems. Dieser Offset wird dann angewendet, bevor die Koordinaten gesendet werden.