Warning
You are reading an old version of this documentation. If you want up-to-date information, please have a look at 5.4 .Default scenario
In this scenario, the robot is allowed to pick parts from any model, with no specific order. The model_quantity parameter is therefore not required. The command get_part simply returns the first part found.
The return value from the command get_part contains the model associated. See command’s documentation for more information on how to parse and extract the model number from the return value.
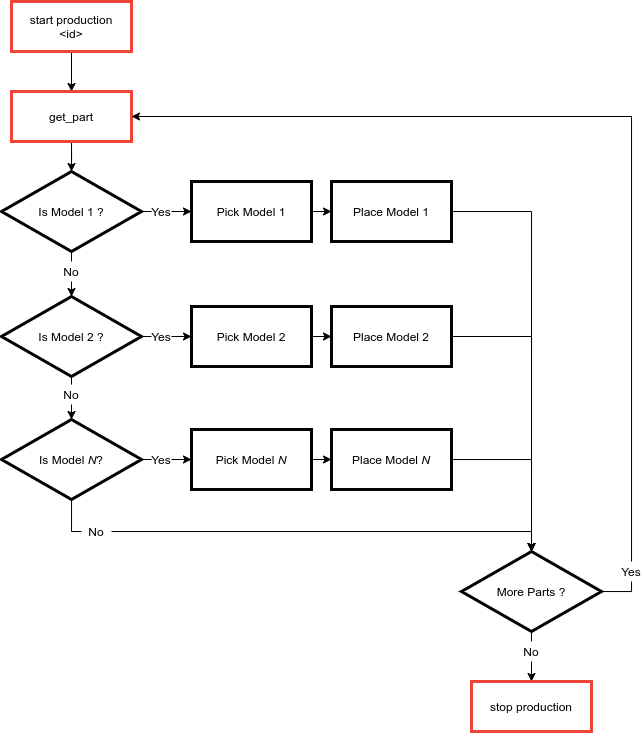
Fig. 252 Production scenario for multi-model
[get_part]: Call the command get_part. If there is already one part available in the list of good candidates, the system will directly return the coordinates of that part. Otherwise, it will vibrate the Asycube and take a picture. The Asycube vibration and image analysis do not stop until the system finds a part (of any model).
[Pick & place part N]: Pick and place the part of model
N. Alternatively, if required, the part can be placed on a flipping station.Start again from step 1. The cycle stops when EYE+ receives the command stop production.