Avertissement
Vous lisez une ancienne version de cette documentation. Si vous souhaitez obtenir des informations actualisées, veuillez consulter 5.4 .Exemple - Siemens TIA Portal
Cette section donne un exemple d’une intégration simple d’EYE+ avec le module PROFINET dans Siemens TIA Portal.
Conditions préalables
- Avant de commencer, veuillez télécharger les fichiers suivants :
Fichier PROFINET GSDML EYE+ (electronic datasheet)
Exemple de code pour TIA Portal
Ces fichiers peuvent être téléchargés à partir des Téléchargements PROFINET.
Une fois que vous avez téléchargé les fichiers nécessaires, veuillez suivre les étapes décrites dans la section Avant de commencer.
Intégration de base
Tout d’abord, importez l’exemple de code TIA.
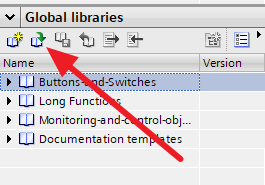
Fig. 239 Importer la bibliothèque d’exemple de code TIA
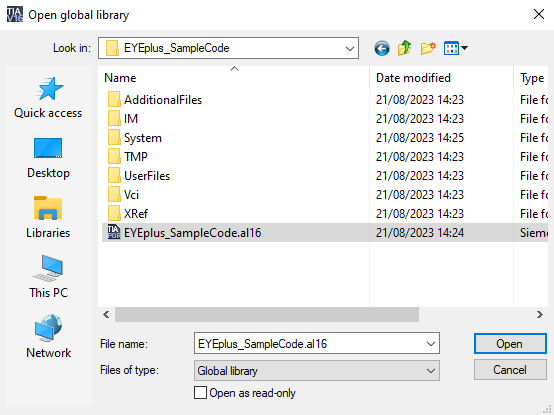
Fig. 240 Sélection du fichier .al16
Importez tous les prérequis suivants dans votre projet TIA :
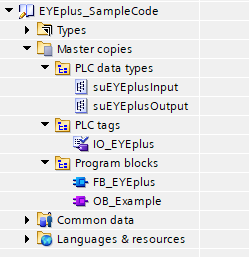
Fig. 241 Faites glisser les fichiers bibliothèque vers votre projet
Enfin, mappez les variables importées à vos E/S EYE+ en leur attribuant l’adresse correcte, comme affiché dans TIA, dans la vue d’ensemble du périphérique EYE+.
Dans cet exemple, les entrées commencent à %I124.0 et la sortie à %Q126.0. Ces adresses varient en fonction de la position de EYE+ dans votre réseau PROFINET.
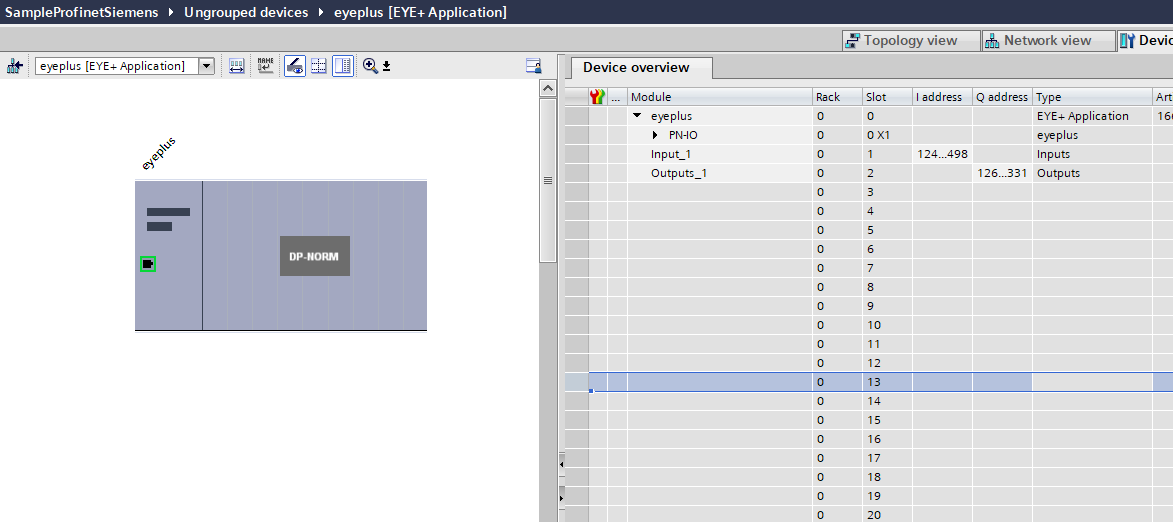
Fig. 242 Notez les adresses d’E/S de votre périphérique EYE+.
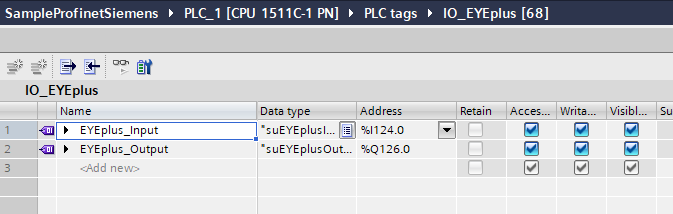
Fig. 243 Mappez l’adresse correcte aux structures importées
Vous pouvez maintenant utiliser les blocs de fonction de la bibliothèque. Les blocs de fonction ne sont qu’un exemple, permettant un contrôle de base de l’EYE+ Controller, à savoir démarrer une production et obtenir vos premières pièces pour une recette précédemment créée sur votre EYE+ Controller. Pour ce faire, dans l’exemple de bloc de fonction, définissez udRecipeID comme égal à l’ID de cette recette, puis donnez à boStart la valeur True. Les coordonnées de la pièce trouvée sont stockées sous reRobotTargetX, reRobotTargetY et reRobotTargetRz.