Avertissement
Vous lisez une ancienne version de cette documentation. Si vous souhaitez obtenir des informations actualisées, veuillez consulter 5.4 .Interfaces électriques
L’EYE+ Controller peut être connecté aux éléments suivants :
Alimentation électrique
Asycube
Caméra
Robot ou API pour travailler en production
Ordinateur ou réseau d’entreprise pour la configuration
Éclairage frontal
Trémie(s)
En option, un API via l’un des modules de bus de terrain en option.
Les connexions principales sont présentées à la Fig. 37.
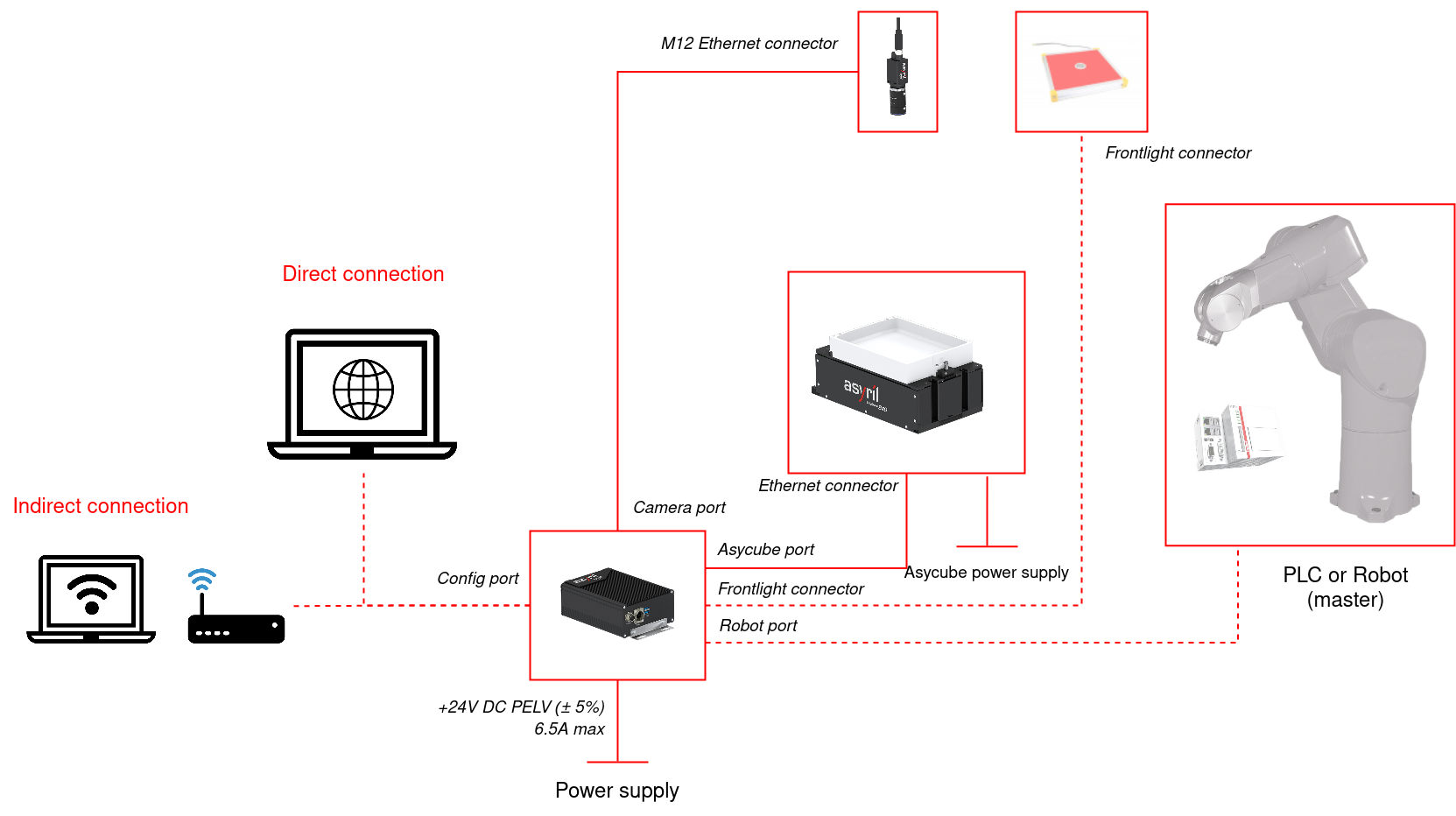
Fig. 37 Schéma de câblage d’EYE+
Remarque
Les câbles de communication peuvent être commandés en différentes longueurs en fonction de vos besoins.
Entrées/sorties d’EYE+
Quatre connecteurs Ethernet sont disponibles sur l’EYE+ Controller :
3 pour la connexion des périphériques : Robot, Asycube, Camera
1 pour la communication directe/indirecte avec votre EYE+ Controller : Configuration
Le Tableau 23 montre la configuration Ethernet par défaut.
Port Ethernet |
Périphérique connecté |
Adresse IP |
Masque de sous-réseau |
|---|---|---|---|
Robot |
Robot ou API |
192.168.0.50 |
255.255.255.0 |
Asycube |
Asycube |
192.168.127.1 |
255.255.255.0 |
Caméra |
Caméra |
192.168.21.1 |
255.255.255.0 |
Config [1] |
Ordinateur ou réseau d’entreprise |
192.168.1.50 |
255.255.255.0 |
La Fig. 38 montre les différents connecteurs des deux côtés de l’EYE+ Controller.
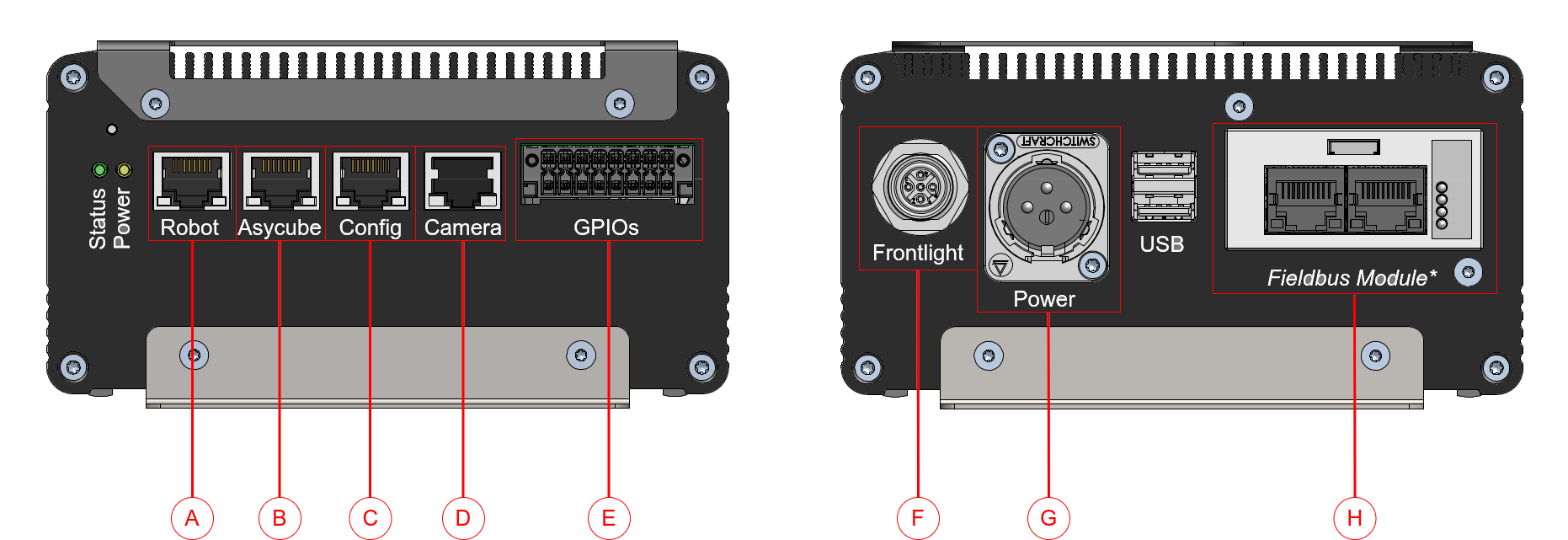
Fig. 38 Connexions de l’EYE+ Controller
(A) Port Ethernet RJ45 pour le Robot/API
(B) Port Ethernet RJ45 pour l’Asycube
(C) Port Ethernet RJ45 Configuration pour accéder à EYE+ Studio depuis votre ordinateur ou votre réseau d’entreprise.
(D) Port PoE pour la Caméra
(E) Connecteur GPIO
(F) Connecteur pour l’Éclairage frontal
(G) Connecteur pour l’Alimentation électrique
(H) En option, Module de bus de terrain