警告
現在、このドキュメントは古いバージョンをご覧いただいています。 最新の情報をご希望の場合は、下記をご参照してください 5.4 .7.3 振動シーケンス
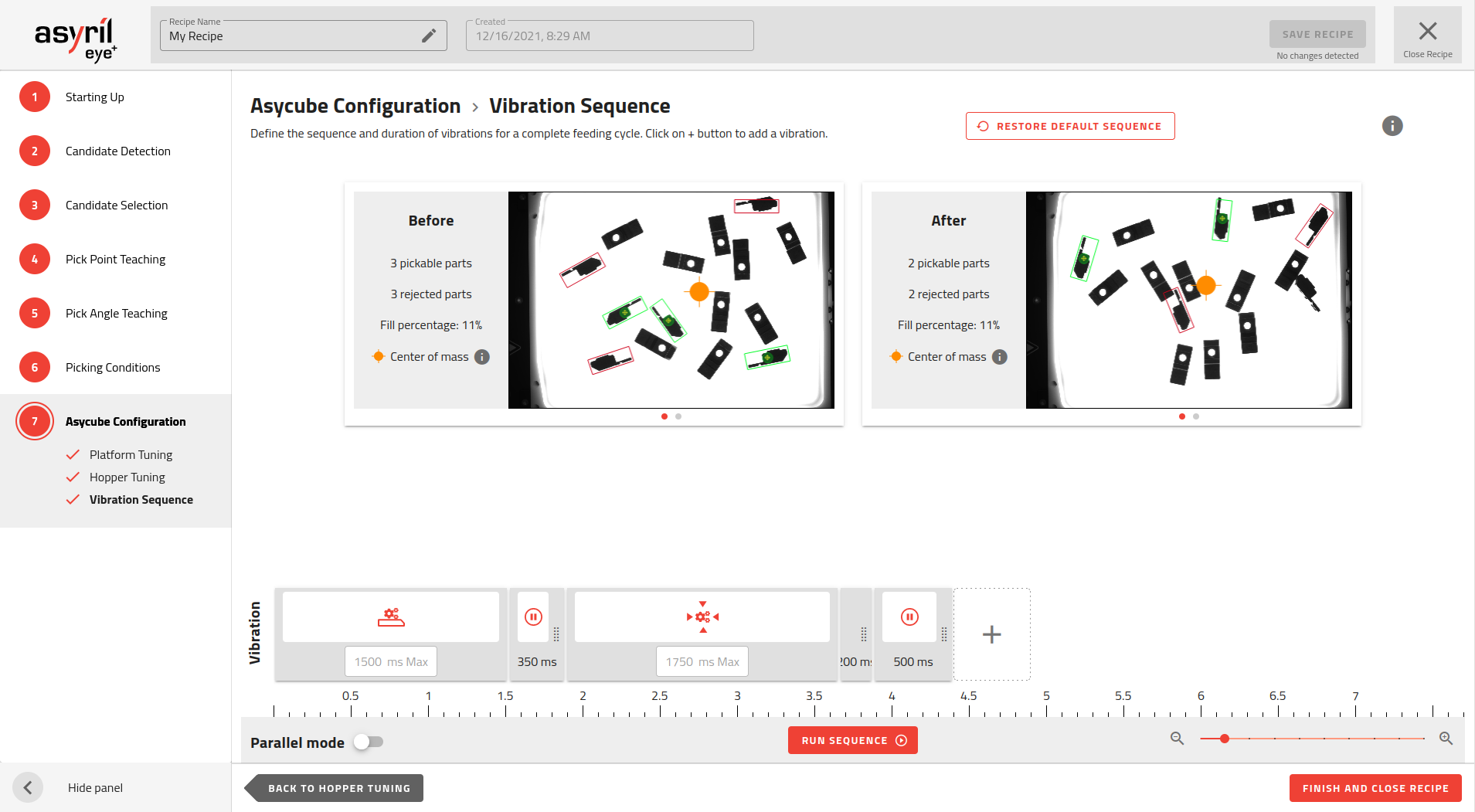
図 124 Asycube の設定:振動シーケンス
振動シーケンスは、Asycube 上でピックできる部品がなくなる度に実行されるシーケンスです。典型的なシーケンスは、ほとんどの場合、次のように設定されています。
【供給動作】 Asycube 上の部品数が最適数に近づくようにします。
【センタリング動作】 部品をAsycubeの中央へ寄せします。
【フリップ】 部品間の接触が多くなりすぎるのを避けるために、フリップにより部品を広げます。
【待ち時間】 振動を実行した後に、部品が静停するまで待ちます。
振動シーケンスの目的は、Asycube 上に十分な数の部品を適切に広げ、新たにピック可能な部品を検出できるようにすることです。
供給動作
スマート供給 
ほとんどの場合、この動作をシーケンスの最初に実施する必要があります。スマート供給では、自動で比例計算した時間だけホッパーを振動させ、Asycubeに最適な部品数を供給します。
スマート供給の持続時間は、最初にAsycube 上にある部品数に依存します。検出された部品数が多いほど振動時間は短くなり、プラットフォーム上の部品数が上限になると、振動時間はゼロまで減少します。その中間では、振動持続時間はリニアに補間されます。
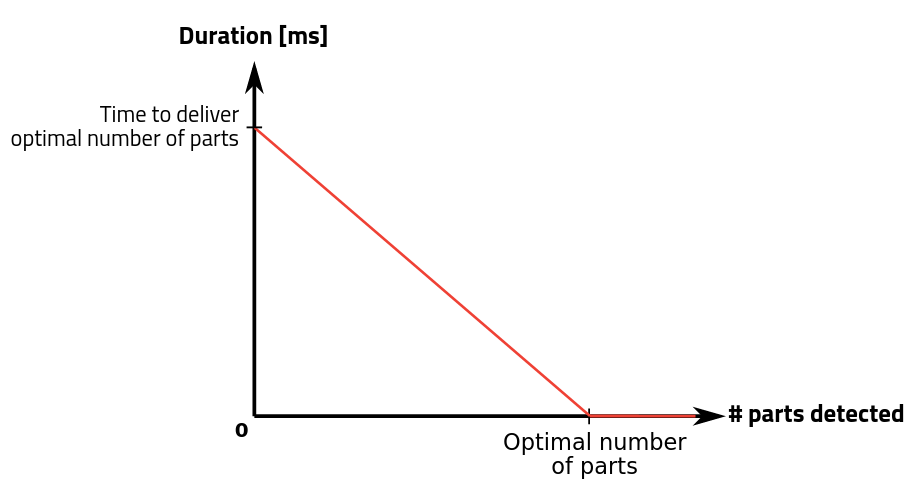
図 125 スマート供給を使って、ホッパー持続時間の調整
例えば、 前のステップの結果で最適数が 40個で、振動時間(最適数を決めるために必要とした時間)が 1000ms であったとします。
第1のケースでは、プラットフォーム上に部品が存在しない場合、効率的な振動時間は1000msとなります。
第2のケースでは、プラットフォーム上に20個の部品が検出された場合、効率的な振動時間は500msとなります。
第3のケースでは、プラットフォーム上に部品が30個検出される場合、効率的な振動時間は250msとなります。
部品を40個以上を検出している場合は、ホッパーの振動は必要ありません。
ホッパー供給 
標準のホッパー供給では、Asycube 上の部品数に関係なく、常に同じ 固定 の持続時間でホッパーを振動させます。
重要
このシーケンスの振動では、 EYE+ がAsycubeに十分な部品を供給できない、あるいは最悪の場合には、供給過剰になってしまう可能性があるため、推奨しません。
この方法の利点は、ホッパーの振動が常に既知の決まった時間となる点です。
センタリング動作
スマートセンタリング 
スマートセンタリングは、自動的に部品をセンタリングするために使用されます。左右、前後の振動の中から最適な振動を組み合わせることにより、部品の任意の初期位置からAsycube の中央寄せを行います。
振動の持続時間は、部品の重心の位置に依存します。振動の持続時間は 7.1 プラットフォームのチューニング ステップで入力された、プラットフォームを横切るための持続時間に比例します。

図 126 スマートセンタリングによるシーケンス
重要
各方向の振動の持続時間として、部品がプラットフォーム全体を横切るための時間を設定しておくことが重要です。スマートセンタリング 振動の有効性は、これらのパラメータが良好に調整されているかどうかに依存します。
注釈
インターフェース上に表示されている時間は、この動作が取り得る最大の時間です。実際の振動時間は、通常この値より短くなります。
交差中央寄せと長軸中央寄せ  +
+ 
注釈
これらのセンタリング動作は、Asycube 240、380、530でのみ使用できます。
クロスセンタリング(交差中央寄せ)は、Asycubeの中央の垂直線上へ部品を移動させ、長軸中央寄せは、Asycube の水平線上へ部品を移動させます。この2つを続けて動作させると、部品はAsycube の中央へ寄せられます。スマートセンタリングよりも実行時間が長くなる可能性がありますが、自動運転中のシーケンスの実行時間が毎回同じ、という利点があります。

図 127 交差中央寄せと長軸中央寄せのシーケンス
その他の動作
その他の動作は、 7.1 プラットフォームのチューニング ステップで調整した個々の動作に対応しています。
基本的な動作:左、右、後、前 



これらの動作は、部品を特定の方向に移動させるために使用することができます。これらの動きは、構造化プレート(穴、溝付き)を使ってロボットがピックする場合に、部品をより有利な位置へ移動させる時に、非常に有用な場合があります。
フリップ 
フリップ(反転)は、部品同士が接触しすぎるのを避けるため、また部品の向きを反転させるために使用します。シーケンスの中で、この動作をセンタリング動作の後に実施することを強く推奨します。
待ち時間 
部品が静停するのを待つために使用します。
重要
シーケンスの終了時の動作として、必ず静停する時間を設けてください。これにより、画像取得中に部品が動かないようにすることができます。静停する時間がなかったり、短すぎたりすると、ピッキング時に問題が発生する可能性があります。
ヒント
アンチローリングプレートを使用することにより、静停時間を短縮することができます。
パラレルモード
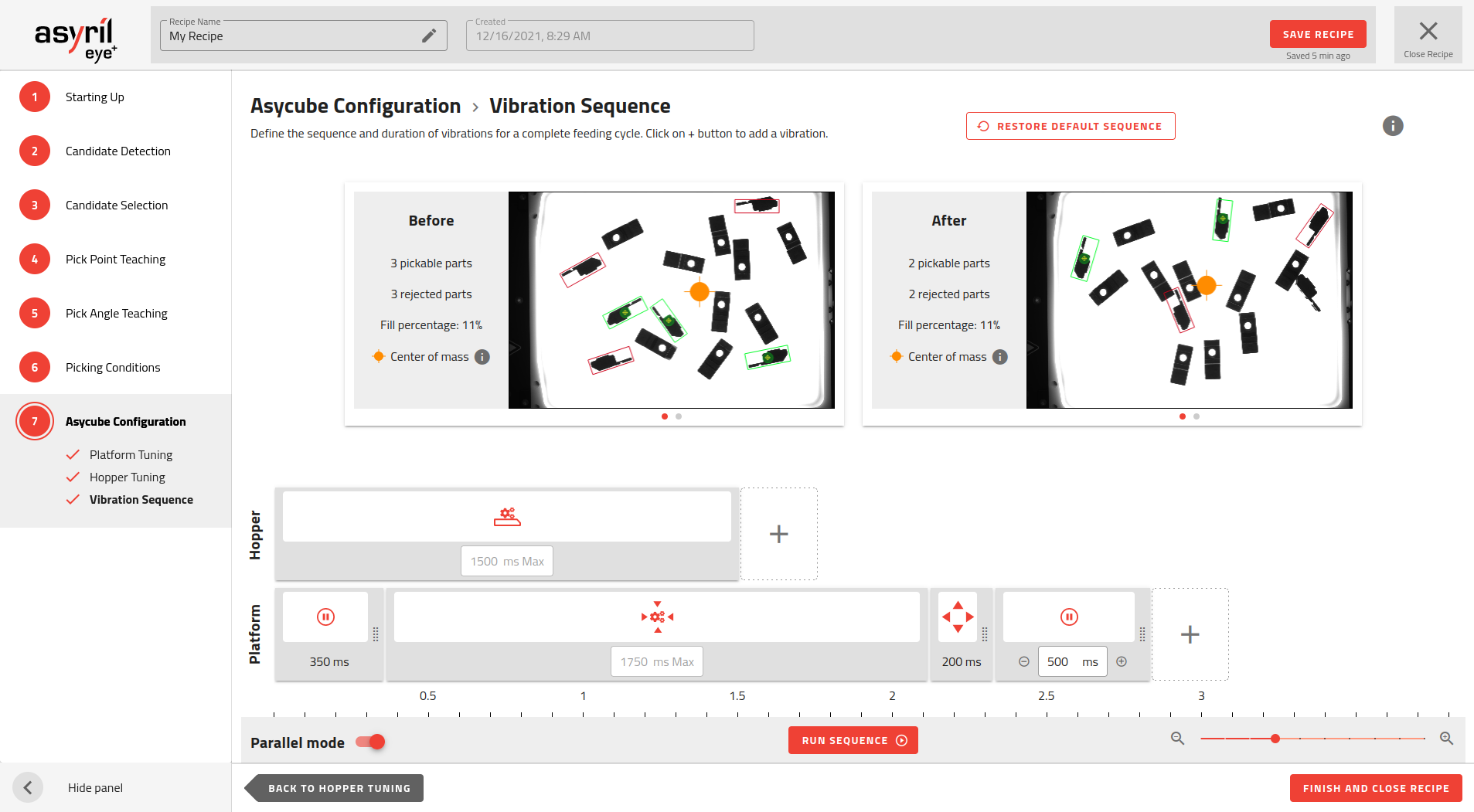
図 128 Asycube の設定:ホッパーとプラットフォームのシーケンス
サイクルタイムが重要な場合は、パラレルモードを使って改善することができます。このモードでは、オリジナルのシーケンスが2つのサブシーケンスに分割され、並行して実行します。
ホッパーシーケンス では、「供給」、または「待ち時間」を選ぶことができます。
プラットフォームのサブシーケンス では、「プラットフォーム」、または「待ち時間」を選ぶことができます。
パラレルモードを有効にするには、 パラレルモード スイッチを使用してください。有効にすると、ホッパーの動作は新しい専用サブシーケンスに移動し、プラットフォームの動作はプラットフォームのサブシーケンスに割り当てられます。
注釈
パラレルモード時に追加した「待ち時間」動作は、パラレルモードを有効にしても、ホッパーシーケンスに移動しません。
振動シーケンスのテスト
をクリックすると、振動シーケンスをテストすることができます。振動前と振動後のAsycube の画像とともに、以下の情報が表示されます。
ピック可能な個数
不合格数
背景と比較した部品の割合をパーセントで表した充填率
オレンジ色の点は、Asycube 上のすべての部品位置から計算した重心を表しています。スマートセンタリング動作の目標は、この重心をAsycube の中央に移動させることです。
ヒント
さまざまな手順でシーケンスをテストします(Asycube 上に部品がない、ホッパーが満杯になっている、Asycube 上に最適な個数の部品がある、すべてが隅にかたまりになっている、など)。この時点で、シーケンスを実行した後のピック可能な部品数の平均をカウントすることで、アプリケーションが達成可能なサイクルタイムを予想することができます。
振動シーケンスが満足されるものである場合、下の を使ってレシピを閉じることができます。 レシピリスト に戻ると、リストの中に作成されたレシピがあります。