Warning
You are reading an old version of this documentation. If you want up-to-date information, please have a look at 1.1 .Plugin release 1.0
Version 1.0.1
Bug Fixes
Global variable EYE1Pos components
Previously, the orientation of the global variable was described as a rotation vector with a prefixed orientation of RX = 180°. The transformation from roll, pitch and yaw coordinates into a rotation vector was performed as follows
The EYE+ sends the coordinates p[X,Y,0,0,0,RZ] (roll, pitch and yaw)
The plugin transforms the roll, pitch and yaw coordinates into a rotation vector: p[X,Y,0,rx,ry,rz].
By transforming the coordinates into a rotation vector, it was not possible to retrieve the true RZ value. This was an issue in case the robot configuration p[X,Y,0,180°,0,RZ] was not suitable for the application.
Now, the global variable EYE1Pos is equal to: p[X,Y,Z,0,0,RZ], where X, Y, RZ are the coordinates sent by EYE+. RZ is in radian. As the robot is expecting a rotation vector, you cannot directly move to the position. You at least have to add the 0-position of the robot as presented below.
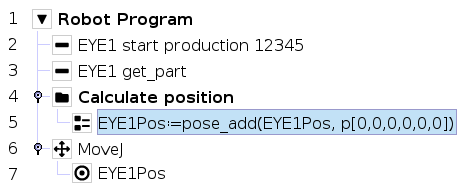
Fig. 31 Position correction before Move
Note
Refer to section EYE1Pos to get more information about the global variable EYE1Pos.
