Warnung
You are reading an old version of this documentation. If you want up-to-date information, please have a look at 5.4 .Can take image
Image acquisition is enabled by default. If necessary, the command can_take_image false allows to disable image acquisition.
It may be useful to disable image acquisition to ensure that an image is not acquired while the robot is still in the field of view. For example, if you disable image acquisition and send the command get_part (Abb. 159), the command will not be able to start (because it performs image acquisition).
Image acquisition is pending until the command can_take_image is reactivated. As soon as it is reactivated, the system will resume the pending command with its usual behavior.
Bemerkung
The time elapsed during can_take_image false is taken into account for the timeout.
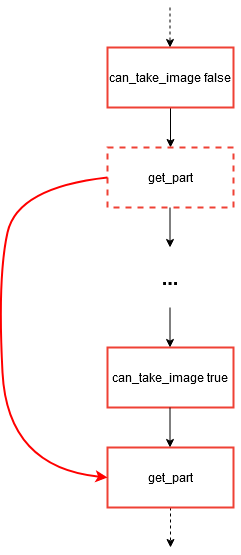
Abb. 159 can_take_image scenario