Warnung
You are reading an old version of this documentation. If you want up-to-date information, please have a look at 5.4 .Image after send
The parameter image_after_send is used to automate a force_take_image before each get_part or prepare_part.
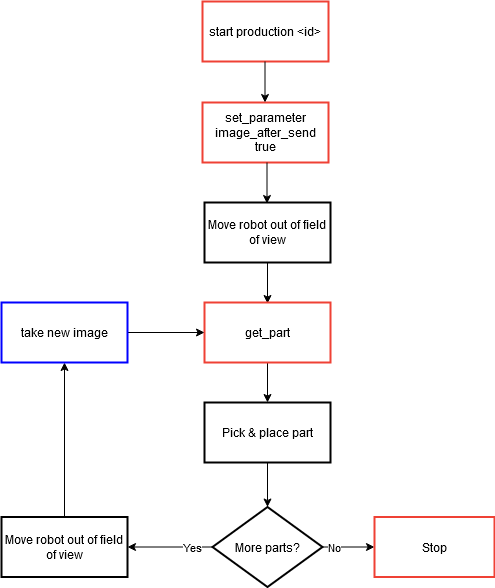
Abb. 160 image_after_send scenario
[set_parameter image_after_send true]: set the parameter image_after_send to true.
[Move robot out of field of view]: Before calling the get_part command, you have to ensure that nothing obstructs the camera view.
[get_part]: Call the get_part command, it will either make the Asycube vibrate and take a picture, or send you directly the coordinates of a part.
[Pick & place part]: Pick and place the part. When the part is picked up or when it is placed or during a robot displacement, the robot touches the Asycube and makes the remaining parts move.
[Move robot out of field of view]: Before calling the get_part command, you have to ensure that nothing obstructs the camera view.
[take new image]: EYE+ takes a new image before the command get_part automatically in response to the parameter image_after_send set to true. It ensures the parts coordinates.
Start again from step 1. The cycle stops when EYE+ receives the command stop production.