Warnung
Sie lesen eine alte Version dieser Dokumentation. Wenn Sie aktuelle Informationen wünschen, schauen Sie bitte unter 5.4 .Modul-Übersicht
Das EtherCAT-Modul entspricht schematisch folgendem Modul:
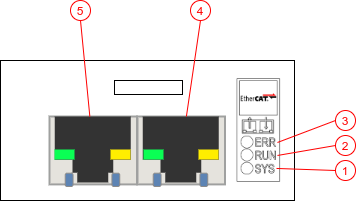
Abb. 250 EtherCAT-Modul
System-LED (SYS)
Betriebs-LED (RUN)
Fehler-LED (ERR)
Schnittstelle X1 (EtherCAT IN), RJ45-Standard
Schnittstelle X2 (EtherCAT OUT), RJ45-Standard
LED-Verhalten
Die folgende Tabelle beschreibt die Bedeutung der verschiedenen LED am Gerät.
LED |
Farbe |
Status |
Beschreibung |
|---|---|---|---|
RUN |
Aus |
Aus |
Modul im Zustand INIT |
Grün |
Blinkend |
Modul im Zustand PRE-OPERATIONAL |
|
Grün |
Einzel-Flash |
Modul im Zustand SAFE-OPERATIONAL |
|
Grün |
An |
Modul im Zustand OPERATIONAL |
|
ERR |
Aus |
Aus |
Kein Fehler |
Rot |
Blinkend |
Interner Fehler |
|
Rot |
Einzel-Flash |
Interner Fehler |
|
Rot |
An |
Interner Fehler |
|
Ethernet-LED |
Aus |
Aus |
Keine Verbindung hergestellt |
Grün |
Blinkend |
Modul sendet |
|
Grün |
An |
Verbindung hergestellt |
Netzwerk-Topologie
Wenn mehrere EtherCAT-Geräte angeschlossen werden sollen, können zwei Topologien angewendet werden:
- Daisy chain und/oder Sterntopologie:
Die Module werden wie eine Daisy Chain verbunden, wobei der EtherCAT-Ausgang des Moduls 1 mit dem EtherCAT-Eingang des Moduls 2 verbunden wird, und so weiter. Das letzte Modul muss nicht zurück an den Master angeschlossen werden.
- Ringtopologie:
Die Module werden so angeschlossen, dass sie einen Ring bilden. Der EtherCAT-Ausgang des Moduls 1 ist mit dem EtherCAT-Eingang des Moduls 2 verbunden, und so weiter. Das letzte Modul ist wieder mit dem EtherCAT-Master verbunden und bildet somit einen Ring.
Bitte prüfen Sie Ihre Anforderungen, um zu entscheiden, welche Topologie Ihren Bedürfnissen am besten entspricht.
Prozessdatenobjekte
EtherCAT ermöglicht den Austausch von zyklischen Echtzeitdaten mit Hilfe von Prozessdatenobjekten (PDOs). Es gibt zwei Arten von PDOs, die den beiden Richtungen entsprechen: RxPDOs und TxPDOs.
Alle notwendigen Befehle, Parameter und Ausgabedaten sind in PDOs implementiert, so dass Sie Ihren EYE+ einfach und vollumfänglich in Ihre Anwendung integrieren können. PDOs spiegeln grösstenteils die Schnittstelle des TCP-Protokolls wider, bieten aber eine spezifische und in der Nutzung bequeme Schnittstelle. Wir empfehlen Ihnen dringend, die TCP-Programmierungsanleitung zu lesen, bevor Sie EYE+ mit dem EtherCAT-Modul integrieren.
Die ESI-Datei kann unter EtherCAT Downloads direkt heruntergeladen werden.
RxPDO
Name |
Datenart |
|---|---|
UDINT |
|
BOOL |
|
BOOL |
|
Recipe ID |
UDINT |
BOOL |
|
BOOL |
|
BOOL |
|
BOOL |
|
BOOL |
|
BOOL |
|
BOOL |
|
REAL |
|
USINT |
|
USINT |
|
USINT |
|
USINT |
|
USINT |
|
BOOL |
|
BOOL |
|
BOOL |
|
UDINT |
|
BOOL |
|
BOOL |
|
BOOL |
|
BOOL |
|
BOOL |
|
BOOL |
|
BOOL |
|
USINT |
|
REAL |
|
REAL |
|
USINT |
|
USINT |
|
USINT |
|
USINT |
|
USINT |
|
USINT |
TxPDO
Name |
Datenart |
|---|---|
UDINT |
|
BOOL |
|
BOOL |
|
UDINT |
|
BOOL |
|
BOOL |
|
UDINT |
|
BOOL |
|
BOOL |
|
BOOL |
|
BOOL |
|
BOOL |
|
USINT |
|
USINT |
|
USINT |
|
USINT |
|
USINT |
|
USINT |
|
Wiederholung von 10 Poses (N = 1 bis 10) |
|
REAL |
|
REAL |
|
REAL |
|
USINT |
|
BOOL |
|
BOOL |
|
BOOL |
|
REAL |
|
USINT |
|
USINT |
|
USINT |
|
USINT |
|
USINT |
|
BOOL |
|
BOOL |
|
BOOL |
|
BOOL |
|
BOOL |
|
BOOL |
|
BOOL |
|
BOOL |
|
BOOL |
|
BOOL |
|
REAL |
|
Wiederholung von 6 vorbereiteten Modellen (N = 1 bis 6) |
|
USINT |
|
Wiederholung von 6 Rücklesewerten von Model Quantity (N = 1 bis 6) |
|
USINT |
|
Wiederholung von 10 Poses Modell (N = 1 bis 10) |
|
USINT |
|