Avertissement
Vous lisez une ancienne version de cette documentation. Si vous souhaitez obtenir des informations actualisées, veuillez consulter 5.4 .2. Détection des candidats
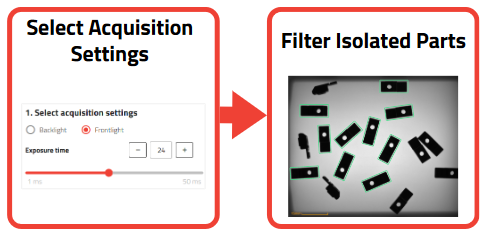
Fig. 46 Aperçu de la détection des candidats
L’objectif de la détection des candidats est de détecter les candidats (c’est-à-dire les pièces qui sont potentiellement de bons « candidats » pour les prochaines étapes de l’assistant) en fonction de leur taille. L’algorithme de détection d’EYE+ filtre les éléments trop petits ou trop grands dans l’image. Les éléments suivants pourraient être détectés faussement comme candidats :
plusieurs pièces en contact considérées comme une seule
des débris sur la plateforme
les formes ou les ombres de la plateforme de production (par exemple, plateforme de production avec des rainures)
Conseil
La détection des candidats peut même filtrer une pièce orientée avec la mauvaise face vers le haut si la taille de cette face ne correspond pas à celle de la face souhaitée.
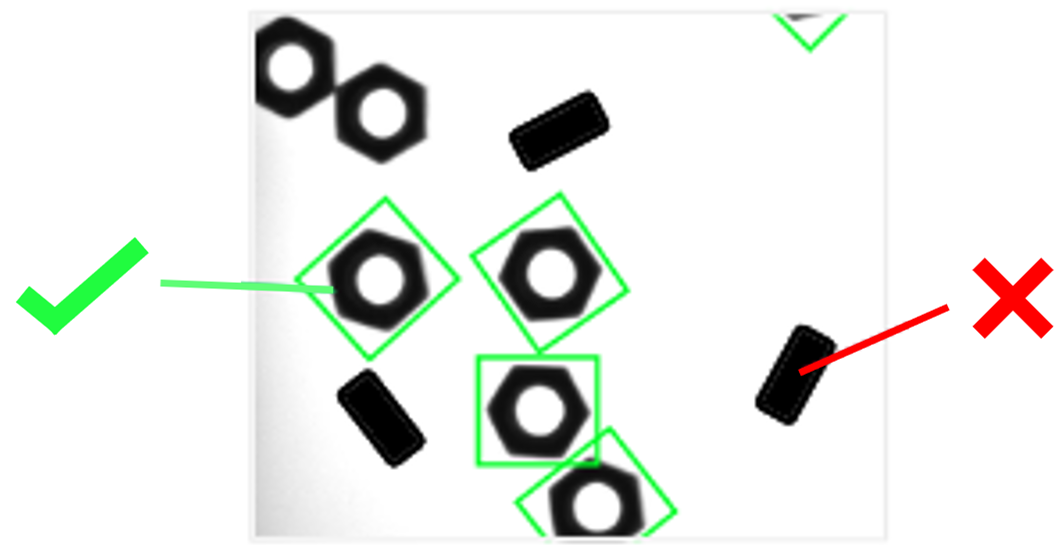
Fig. 47 L’orientation des pièces est filtrée par leur taille. Dans ce cas, les pièces mal orientées ont une surface plus petite et sont donc éliminées.
À la fin de cette étape, vous devriez avoir un maximum de pièces isolées entourées d’un rectangle vert (appelé cadre englobant ou bounding box) et un minimum d’éléments de mauvaise taille détectés (poussière, élément de fond …).