Avertissement
Vous lisez une ancienne version de cette documentation. Si vous souhaitez obtenir des informations actualisées, veuillez consulter 5.4 .2. Détection des candidats
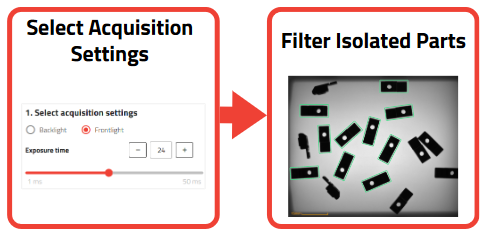
Fig. 67 Aperçu de la détection des candidats
L’objectif de la détection des candidats est de détecter les candidats (c’est-à-dire les pièces qui sont potentiellement de bons « candidats » pour les prochaines étapes de l’assistant) en fonction de leur taille. L’algorithme de détection d’EYE+ filtre les éléments trop petits ou trop grands dans l’image. Les éléments suivants sont indésirables :
plusieurs pièces en contact considérées comme une seule
des débris sur la plateforme
les formes ou les ombres de la plateforme de production (par exemple, plateforme de production avec des rainures)
Conseil
La détection des candidats peut même filtrer une pièce orientée avec la mauvaise face vers le haut si la taille de cette face ne correspond pas à celle de la face souhaitée.
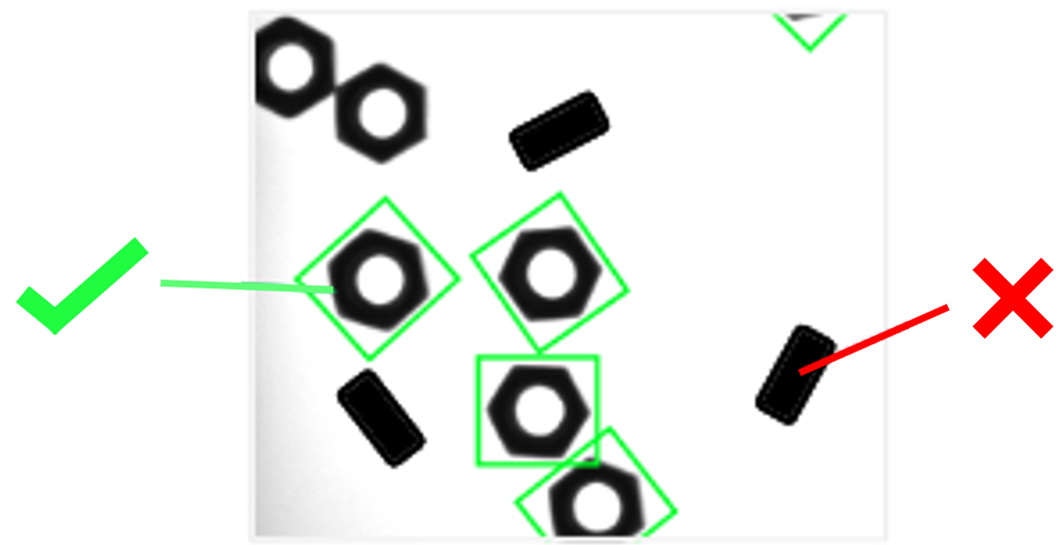
Fig. 68 L’orientation des pièces est filtrée par leur taille. Dans ce cas, les pièces mal orientées ont une surface plus petite et sont donc éliminées.
À la fin de cette étape, vous devriez avoir le plus possible de pièces isolées entourées d’un rectangle vert (appelé cadre englobant ou bounding box) et le moins possible d’éléments de mauvaise taille détectés (poussière, élément de fond …).
Image de segmentation
Tous les paramètres définis à cette étape seront utilisés pour générer une image en noir et blanc contenant uniquement les candidats en blanc, appelée image de segmentation. Cela permet au système de traiter les données d’entrée plus rapidement. Pour voir l’image de segmentation résultante, vous pouvez cliquer sur les points situés sous l’image par défaut pour passer de celle-ci à l’image de segmentation.
Cela peut vous aider à décider s’il est nécessaire d’utiliser une région d’intérêt personnalisée (voir la page suivante pour plus de détails).
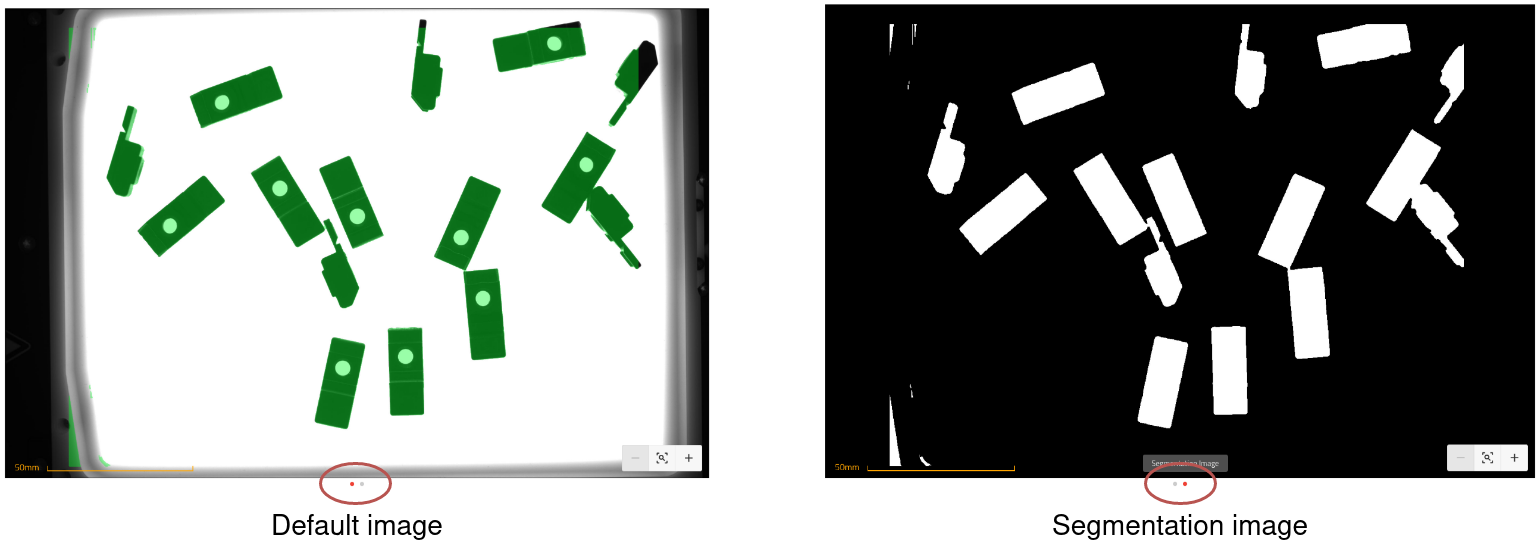
Fig. 69 Passage de l’image par défaut à l’image de segmentation