Avertissement
Vous lisez une ancienne version de cette documentation. Si vous souhaitez obtenir des informations actualisées, veuillez consulter 5.4 .6.3 Résultats
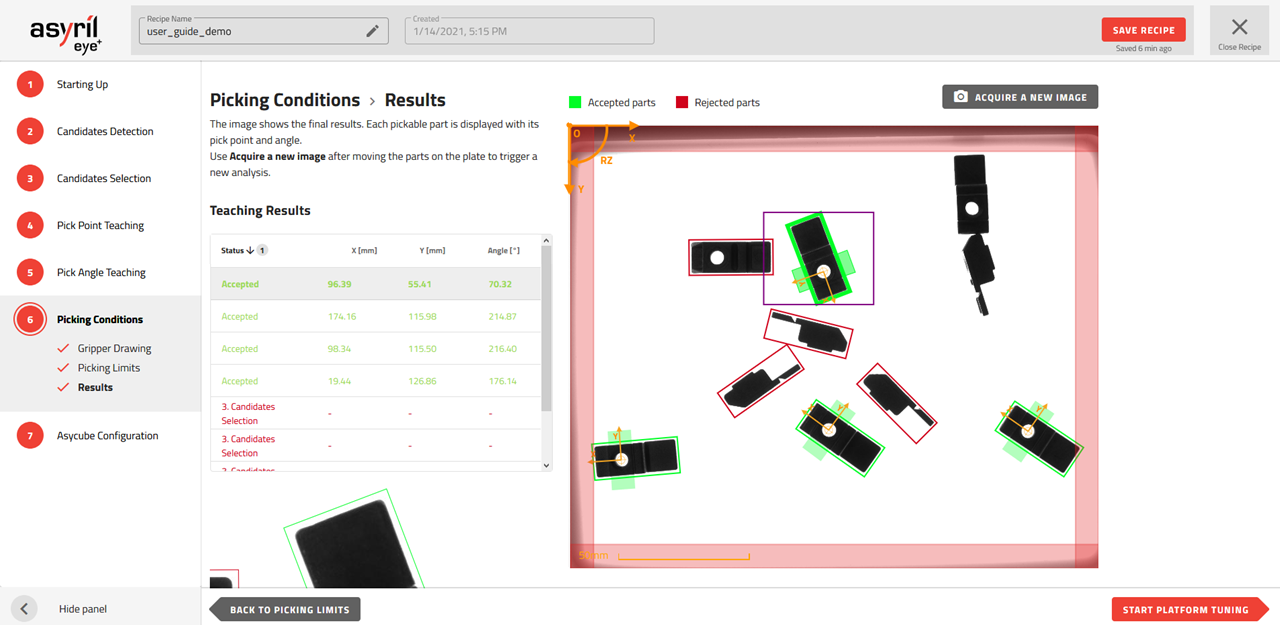
Fig. 104 Conditions de prise - Résultats
Les résultats de cette étape représentent toutes les pièces pouvant être prises par le robot. Les coordonnées des pièces en vert seront envoyées au robot si une commande get_part est exécutée.
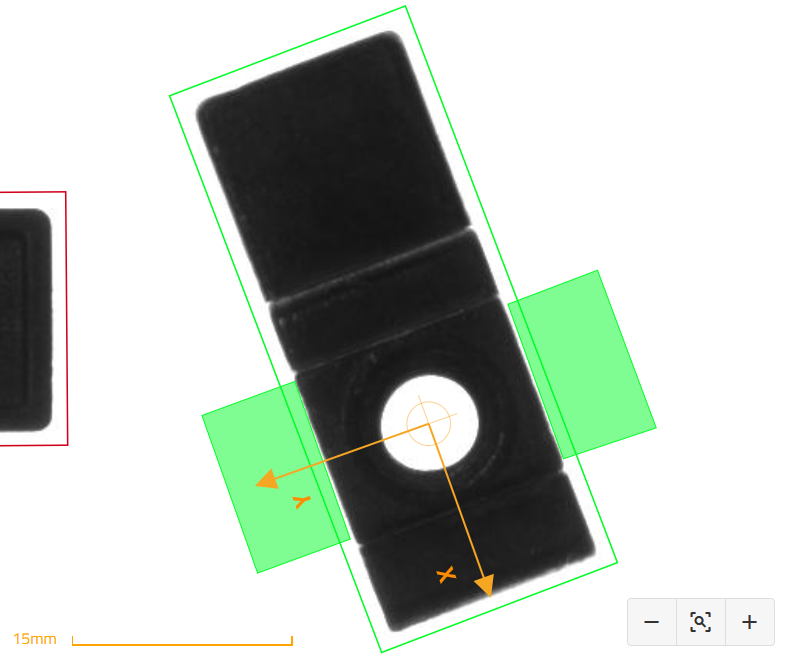
Fig. 105 Conditions de prise - Résultats zoom sur une pièce
Toutes les pièces en rouge sont des pièces rejetées ne pouvant pas être prises par le robot. Le tableau indique le statut de rejet de chaque pièce, c’est-à-dire l’étape à laquelle les pièces ont été rejetées :
Sélection des candidats : si la pièce est mal orientée.
Apprentissage du point de prise : si le point de prise ne peut pas être placé sur la pièce avec un score supérieur au seuil défini.
Apprentissage de l’angle de prise : si l’angle de prise ne peut pas être placé sur la pièce avec un score supérieur au seuil défini.
Conditions de prise : si la zone de dégagement de la pièce est en contact avec un objet ou les limites de prise.
Remarque
Si une pièce n’est pas entourée d’un rectangle vert ou rouge, cela signifie qu’elle a déjà été filtrée à l’étape de la détection des candidats. Dans ce cas, vous pouvez modifier les paramètres de cette étape.