Avertissement
Vous lisez une ancienne version de cette documentation. Si vous souhaitez obtenir des informations actualisées, veuillez consulter 5.4 .Robot
Accédez à la configuration du robot en allant dans le menu puis cliquez sur Robot.
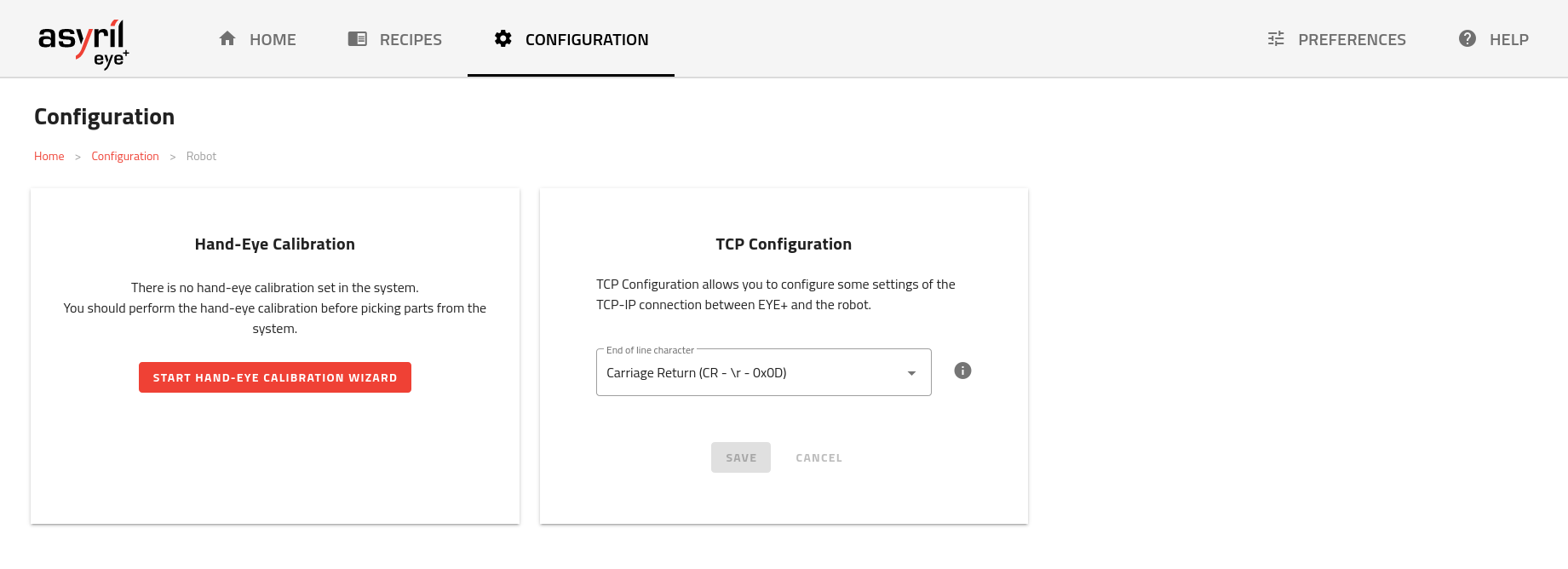
Fig. 164 Interface de configuration du robot
La page de configuration du robot comprend deux sections:
Étalonnage main-œil
La fenêtre de l’étalonnage main-œil vous informe sur l’état actuel de l’ Assistant d’étalonnage main-œil et vous permet de l’ouvrir.
Trois variantes de l’interface sont possibles :
Aucun étalonnage main-œil n’a été réalisé (Fig. 165)
Fig. 165 Aucun étalonnage main-œil n’a été réalisé
Étalonnage main-œil en cours (Fig. 166)
Fig. 166 Étalonnage main-œil en cours
Étalonnage main-œil déjà effectué (Fig. 167)
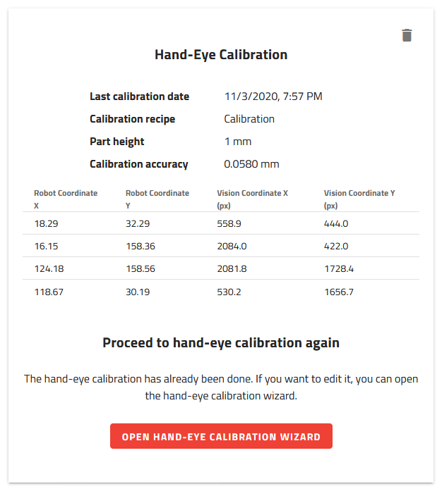
Fig. 167 Étalonnage main-œil déjà effectué
Si l’étalonnage main-œil a déjà été effectué, certaines informations concernant le dernier étalonnage main-œil sont disponibles :
Date du dernier étalonnage
Recette d’étalonnage
Hauteur de la pièce
Précision de l’étalonnage
Accéder à l’assistant d’étalonnage main-œil
Cliquez sur ou pour accéder à l” Assistant d’étalonnage main-œil.
Configuration TCP
Cette section vous permet de sélectionner un autre caractère de fin de ligne. Cela peut être nécessaire en fonction de votre robot et/ou API.
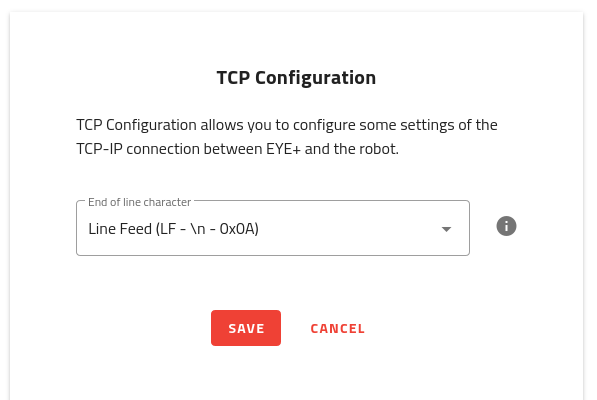
Trois options différentes sont disponibles :
LF : le caractère de fin de ligne est le caractère spécial LF (c’est-à-dire
\n, code ASCII0x0A)CR + LF : le caractère de fin de ligne est le caractère spécial CR + LF (c’est-à-dire
\r\n, codes ASCII0x0D 0x0A)CR : le caractère de fin de ligne est le caractère spécial CR (c’est-à-dire
\r, code ASCII0x0D).
Le caractère de fin de ligne par défaut utilisé par l’EYE+ Controller est LF.
Remarque
Si vous modifiez ce paramètre, toute connexion ouverte sera interrompue de force.