Avertissement
Vous lisez une ancienne version de cette documentation. Si vous souhaitez obtenir des informations actualisées, veuillez consulter 5.4 .Robot
Accédez à la configuration du robot en allant dans le menu puis cliquez sur Robot.
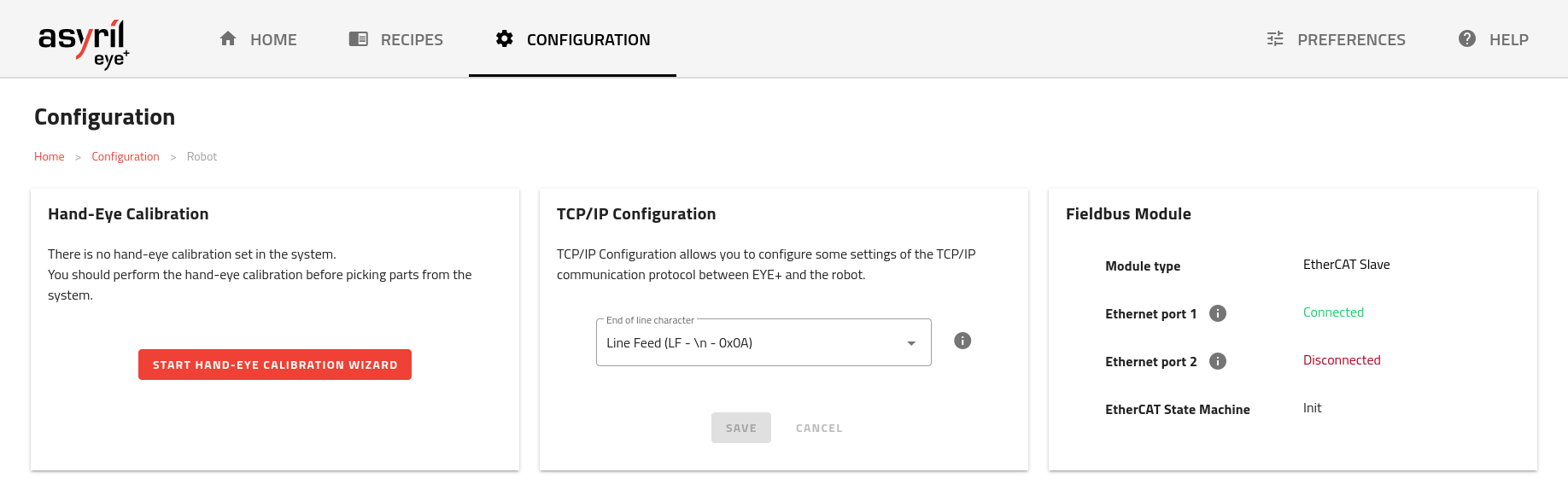
Fig. 165 Interface de configuration du robot
La page de configuration du robot comprend deux sections:
Étalonnage main-œil
La fenêtre de l’étalonnage main-œil vous informe sur l’état actuel de l’ Assistant d’étalonnage main-œil et vous permet de l’ouvrir.
Trois variantes de l’interface sont possibles :
Aucun étalonnage main-œil n’a été réalisé (Fig. 166)
Fig. 166 Aucun étalonnage main-œil n’a été réalisé
Étalonnage main-œil en cours (Fig. 167)
Fig. 167 Étalonnage main-œil en cours
Étalonnage main-œil déjà effectué (Fig. 168)
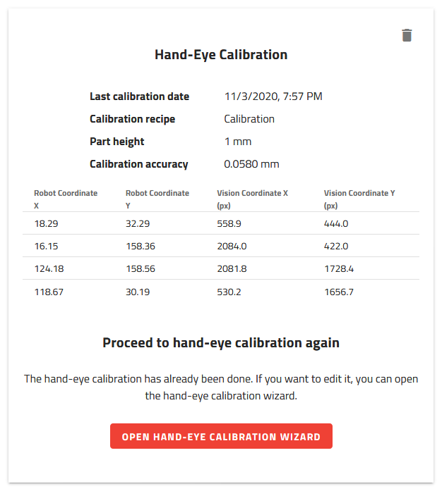
Fig. 168 Étalonnage main-œil déjà effectué
Si l’étalonnage main-œil a déjà été effectué, certaines informations concernant le dernier étalonnage main-œil sont disponibles :
Date du dernier étalonnage
Recette d’étalonnage
Hauteur de la pièce
Précision de l’étalonnage
Accéder à l’assistant d’étalonnage main-œil
Cliquez sur ou pour accéder à l” Assistant d’étalonnage main-œil.
Configuration TCP
Cette section vous permet de sélectionner un autre caractère de fin de ligne. Cela peut être nécessaire en fonction de votre robot et/ou API.
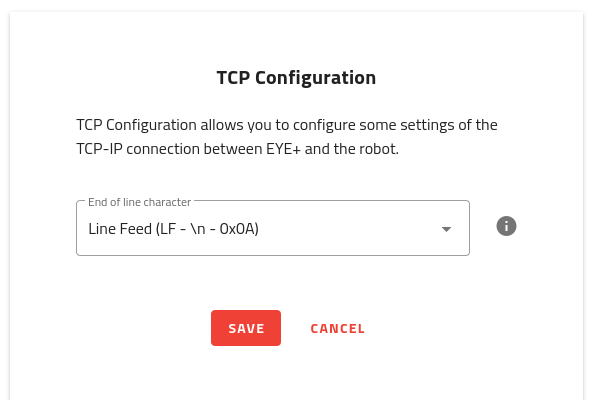
Trois options différentes sont disponibles :
LF : le caractère de fin de ligne est le caractère spécial LF (c’est-à-dire
\n, code ASCII0x0A)CR + LF : le caractère de fin de ligne est le caractère spécial CR + LF (c’est-à-dire
\r\n, codes ASCII0x0D 0x0A)CR : le caractère de fin de ligne est le caractère spécial CR (c’est-à-dire
\r, code ASCII0x0D).
Le caractère de fin de ligne par défaut utilisé par l’EYE+ Controller est LF.
Remarque
Si vous modifiez ce paramètre, toute connexion ouverte sera interrompue de force.
Module de bus de terrain
La fenêtre du module de bus de terrain affiche différentes informations relatives au module de bus de terrain optionnel.
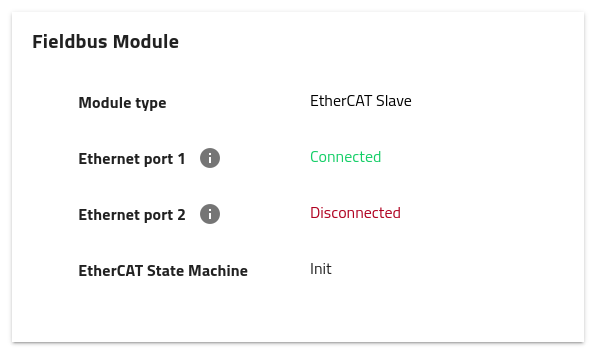
Type de module, type de module (c’est-à-dire la technologie de bus de terrain supportée)
Port Ethernet 1, Informations relatives au port Ethernet 1 (à côté des LED).
Port Ethernet 2, Informations relatives au port Ethernet 2.
Autre(s), diverses autres informations relatives au module bus de terrain spécifique installé.