Avertissement
Vous lisez une ancienne version de cette documentation. Si vous souhaitez obtenir des informations actualisées, veuillez consulter 5.4 .Scénario standard
Dans ce scénario, le robot est autorisé à prélever des pièces de n’importe quel modèle, sans ordre particulier. Il n’est donc pas nécessaire de définir le paramètre model_quantity. La commande get_part renvoie simplement la première pièce trouvée.
La valeur de retour de la commande get_part contient le modèle associé. Consultez la documentation relative à la commande pour plus d’informations sur la manière d’analyser et d’extraire le numéro de modèle de la valeur de retour.
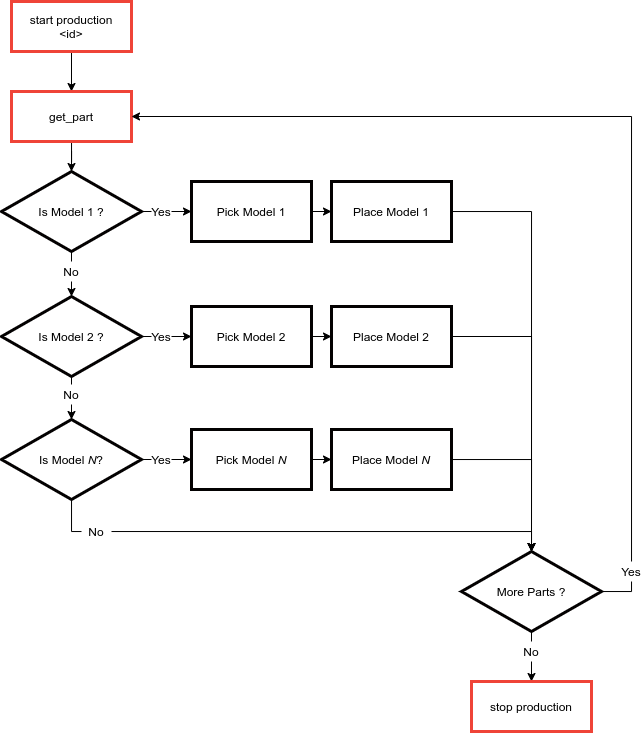
Fig. 267 Scénario de production multi-model
[get_part] : Exécutez la commande get_part. S’il y a déjà une pièce disponible dans la liste des bons candidats, le système renverra directement les coordonnées de cette pièce. Sinon, il fera vibrer l’Asycube et prendra une photo. La vibration de l’Asycube et l’analyse de l’image seront répétées jusqu’à ce que le système ait trouvé une pièce (de n’importe quel modèle).
[Prélever et placer la pièce N]: Prélevez et placez la pièce du modèle
N. Si nécessaire, la pièce peut également être placée sur une station de retournement.Recommencez à partir de l’étape 1. Le cycle s’arrête lorsqu’EYE+ reçoit la commande stop production.