Avertissement
Vous lisez une ancienne version de cette documentation. Si vous souhaitez obtenir des informations actualisées, veuillez consulter 5.4 .Assistant d’étalonnage main-œil
Cet assistant vous guide à travers l’étalonnage main-œil.
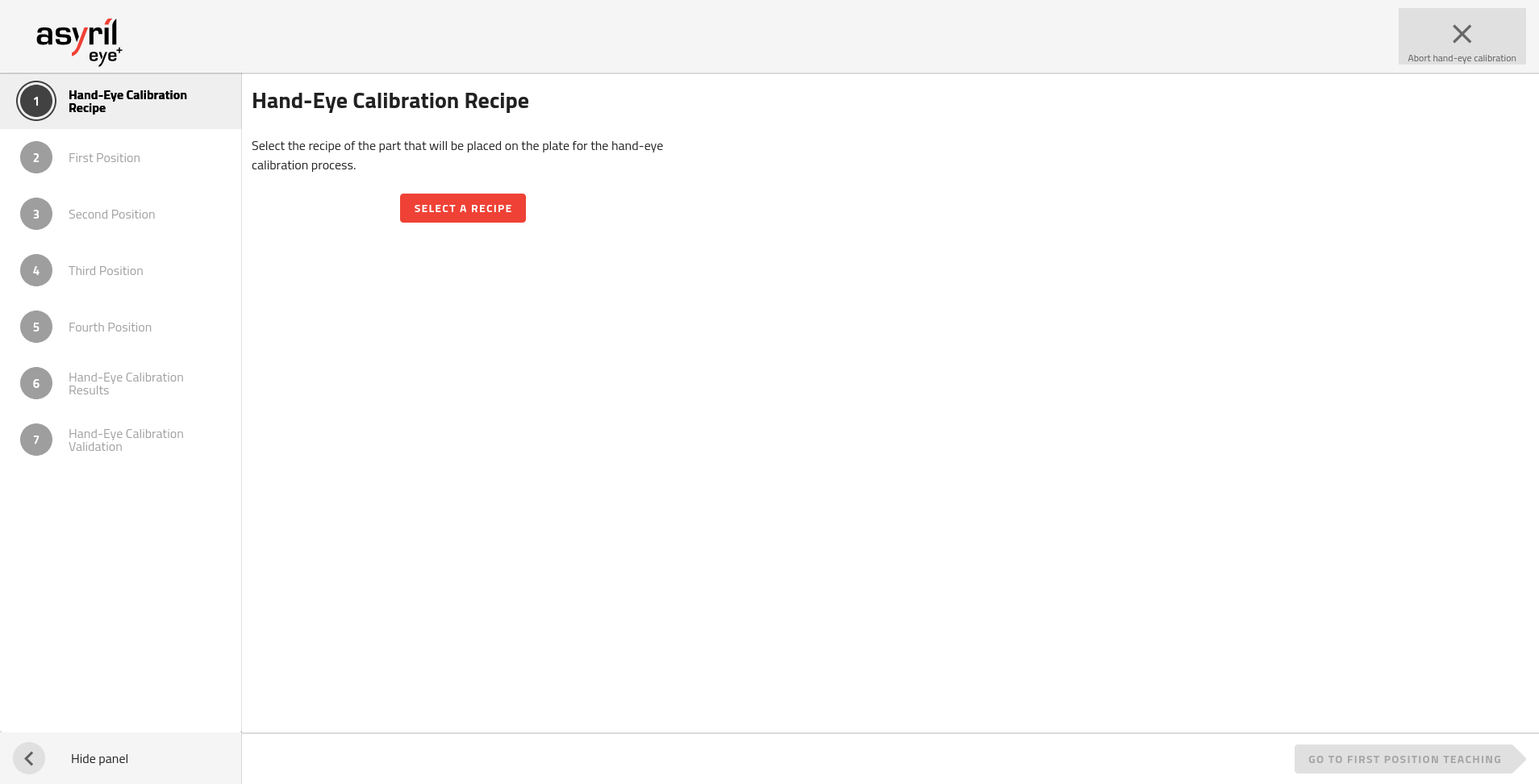
Fig. 209 Assistant d’étalonnage main-œil
Il est composé de 7 étapes.
Remarque
Veuillez consulter la section Étalonnage main-œil - bonnes pratiques pour plus d’informations sur la façon de définir le système de coordonnées du robot et sur la façon d’augmenter la précision de l’étalonnage main-œil.
1. Recette d’étalonnage main-œil
Vous devez sélectionner une recette qui sera utilisée pour l’étalonnage main-œil. Les paramètres requis de la recette sont copiés dans la recette d’étalonnage main-œil. Il n’y a pas de lien dynamique entre la recette sélectionnée et la recette d’étalonnage main-œil.
Remarque
Si vous devez modifier la recette d’étalonnage main-œil, vous devez modifier cette recette dans et ensuite recommencer l’étalonnage main-œil en sélectionnant la recette modifiée.
Remarque
Si vous souhaitez utiliser une recette multi-feeding (voir Multi-feeding), le processus de calibration devra être effectué avec la pièce A uniquement. Cette fonctionnalité nécessite la version 2.1 ou plus récente d’EYE+.
Vous pouvez soit choisir la recette de la pièce que vous voulez prélever en production, soit choisir une pièce spécifique qui n’est utilisée que pour un étalonnage précis (voir la section Utilisation d’une pièce dédiée à l’étalonnage main-œil).
Important
Cependant, dans tous les cas, vous devez utiliser la plateforme de production que vous utiliserez en mode production. Si vous ne le faites pas, les coordonnées des pièces pourraient être inexactes.
Une fois que vous avez sélectionné la recette que vous voulez utiliser, les informations suivantes s’affichent :
Nom de la recette
Hauteur de la pièce
Une photo de la pièce choisie
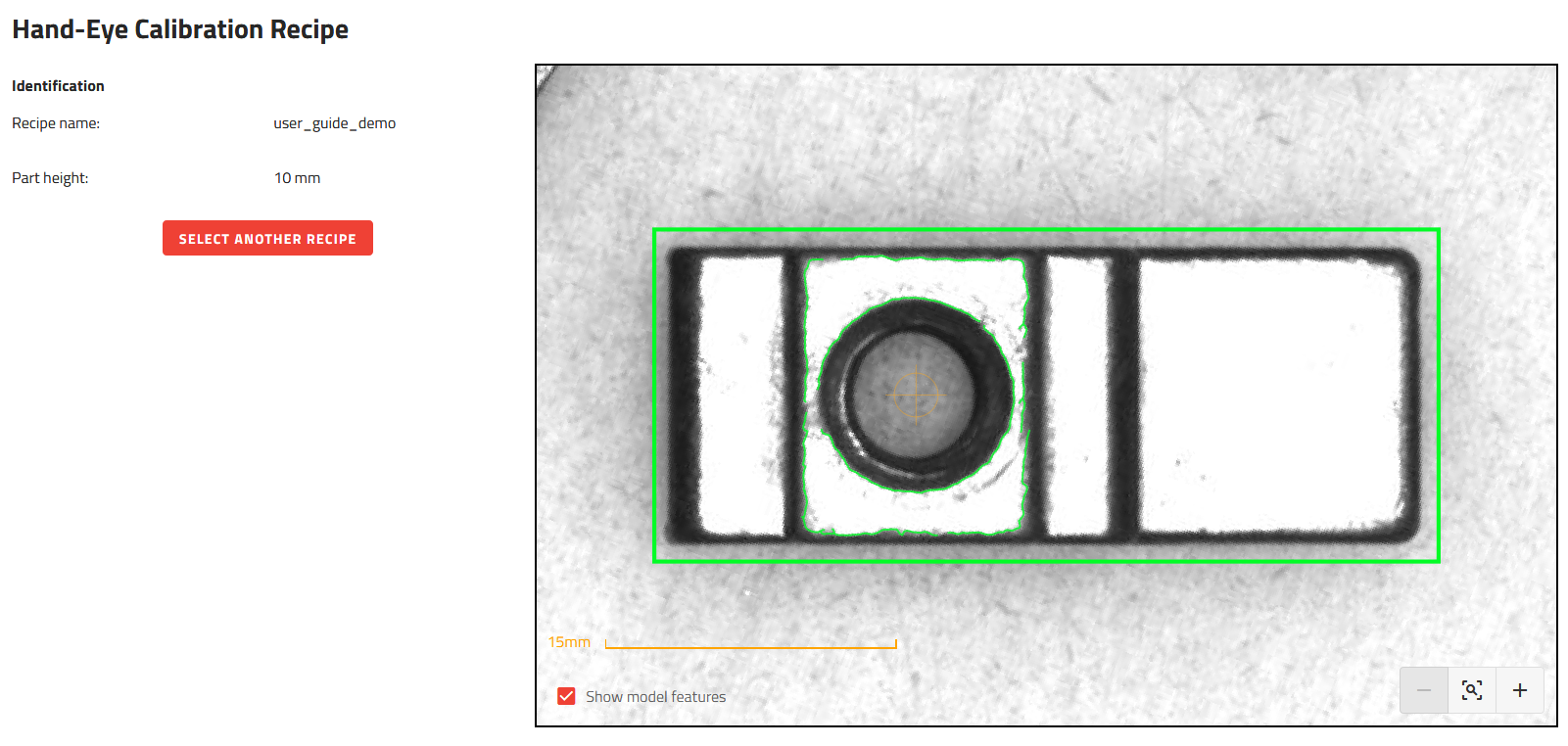
Fig. 210 Recette d’étalonnage main-œil
2. Première position
Cette étape est composée de 5 sous-étapes.
a. Préparer le préhenseur
Il y a deux façons de préparer le préhenseur :
La première façon de procéder consiste à placer la pièce directement dans le préhenseur. Assurez-vous que la pièce est positionnée dans le préhenseur de la même manière qu’elle le sera en production. Essayez de placer la pièce aussi précisément que possible dans le préhenseur. Le Point central de l’outil (Tool center point TCP) doit être placé à la position de prélèvement que vous avez définie dans la recette.
Important
Si la pièce n’a pas exactement la même position dans le préhenseur pour les quatre étapes de positionnement (2. Première position, 3. Deuxième position, 4. Troisième position, 5. Quatrième position), votre étalonnage sera moins précis car la position de prélèvement détectée par la vision ne sera pas parfaitement alignée avec les coordonnées du robot que vous fournirez.
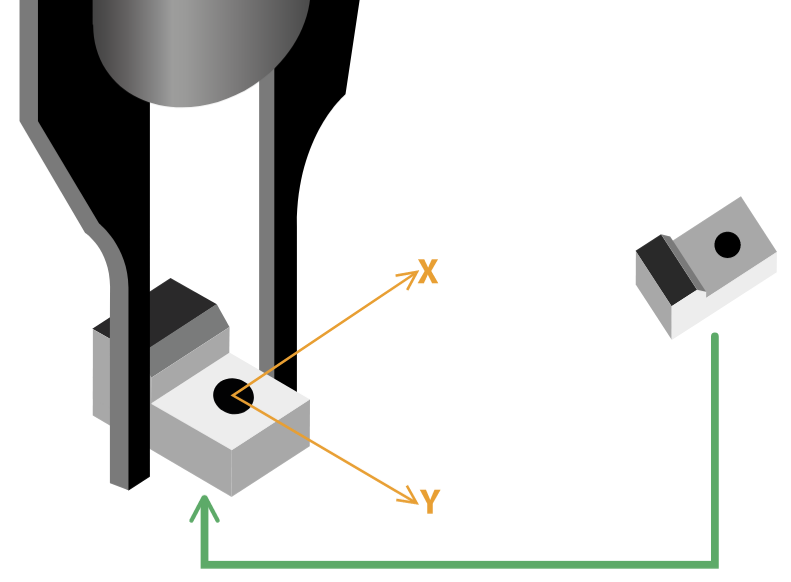
Fig. 211 Préparer le préhenseur : première façon de faire
La deuxième façon de procéder consiste à placer la pièce directement sur la plaque sans utiliser le préhenseur. La pièce doit être orientée de telle sorte qu’elle puisse être saisie par le préhenseur. L’avantage de cette méthode est qu’à l’étape suivante, le préhenseur n’aura pas besoin de toucher la pièce. Comme l’étalonnage main-œil ne traite que les coordonnées X et Y, le TCP peut être placé au-dessus de la position de prélèvement sans toucher la pièce.
b. Déplacer le robot
Amenez le robot dans la bonne position. Il existe deux façons de le faire :
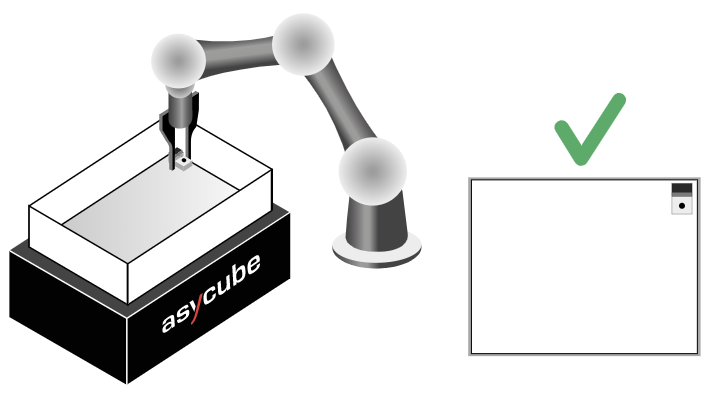
Fig. 212 Déplacer le robot vers la première position
La première façon de procéder consiste à déplacer le préhenseur (qui tient la pièce) vers l’un des quatre coins de l’Asycube. La pièce doit être parfaitement en contact avec la surface et doit toujours être bien maintenue par le préhenseur en position de prélèvement.
La deuxième manière de procéder consiste à placer le TCP sur la pièce déjà en place sur l’Asycube. La pièce doit d’abord être placée dans l’un des quatre coins de l’Asycube.
Important
Le préhenseur ne doit pas toucher les bords de l’Asycube.
Remarque
Pour augmenter la précision de votre étalonnage, veillez à placer chacune des quatre positions aussi loin que possible les unes des autres.
c. Coordonnées du robot
Indiquez les coordonnées robot du préhenseur. Les coordonnées doivent se trouver dans le système de coordonnées du robot que vous avez choisi (Système de coordonnées du robot (Robot coordinate frame RCF)).
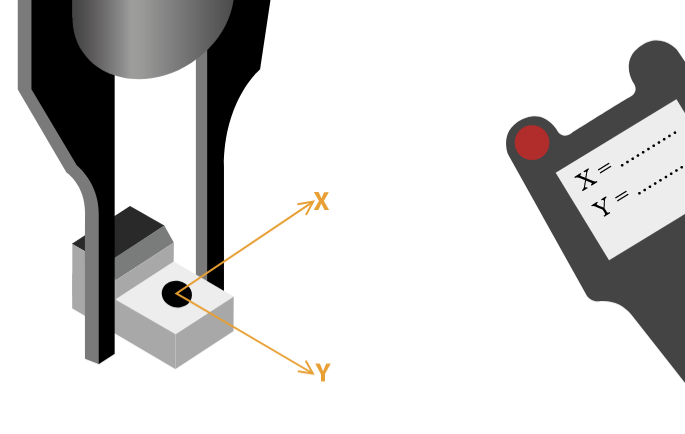
Fig. 213 Saisissez les coordonnées du robot
Remarque
Indiquez les coordonnées du robot dans l’unité de mesure de votre robot. Certains robots travaillent en mètres/pouces, d’autres en millimètres…
d. Enlever le robot
Relâchez la pièce (si nécessaire) et retirez le robot du champ de vue de la caméra.
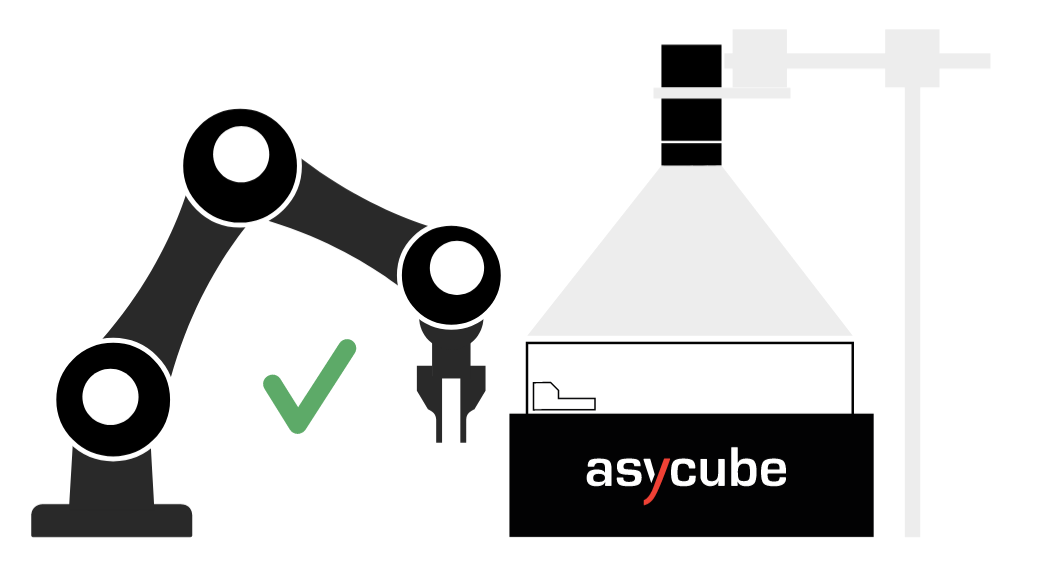
Fig. 214 Retirez le robot du champ de vue de la caméra
Important
Faites attention à ne pas déplacer la pièce lorsque vous déplacez le robot hors du champ de vue de la caméra. Cela entraînerait une diminution de la précision de votre étalonnage.
e. Prendre une photo
Prenez une photo de la pièce sur l’Asycube. EYE+ déduira les coordonnées de la pièce dans le système de coordonnées de la vision.
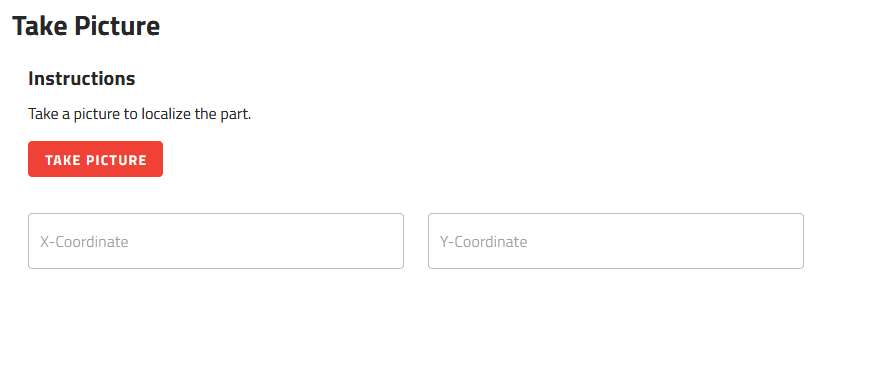
Fig. 215 Prenez une photo de la pièce
Remarque
Si EYE+ n’a pas trouvé la pièce, recommencez cette étape et placez la pièce différemment. Si cela ne fonctionne toujours pas, vérifiez votre recette.
3. Deuxième position
La procédure est la même que celle présentée dans la section 2. Première position. La pièce doit être placée dans un coin différent que lors de la première position (Fig. 216).
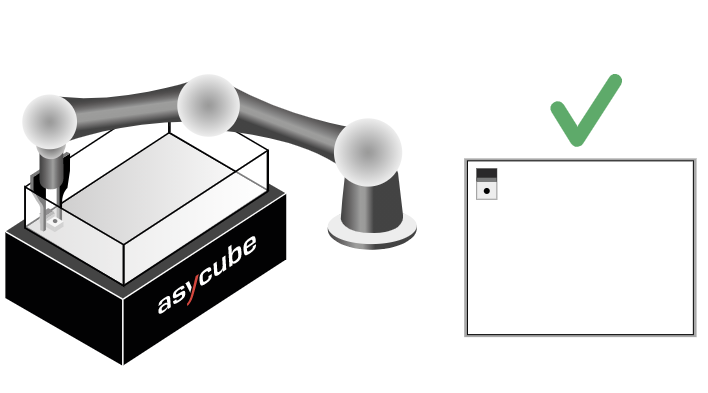
Fig. 216 Déplacez le robot vers la deuxième position
4. Troisième position
La procédure est la même que celle présentée dans la section 2. Première position. La pièce doit être placée dans un coin différent que lors des première et deuxième positions (Fig. 217).
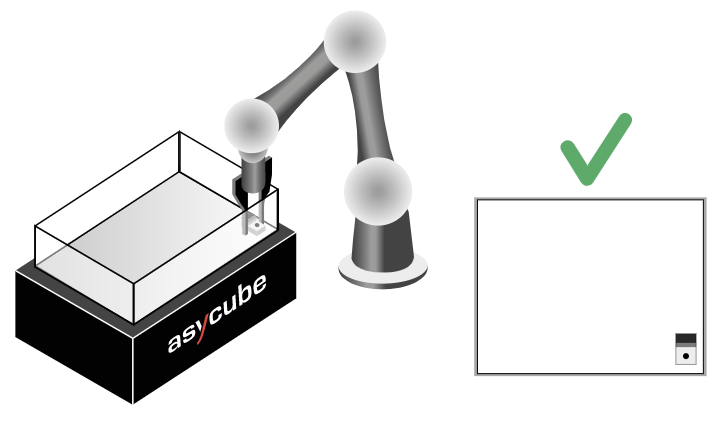
Fig. 217 Déplacez le robot vers la troisième position
5. Quatrième position
La procédure est la même que celle présentée dans la section 2. Première position. La pièce doit être placée dans un coin différent que lors des première, deuxième et troisième positions (Fig. 218).
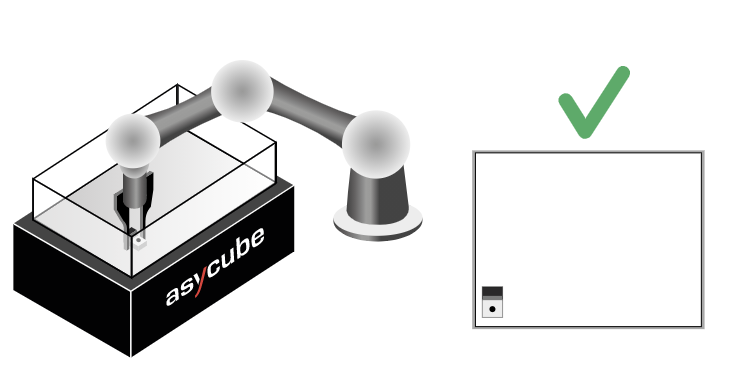
Fig. 218 Déplacez le robot vers la quatrième position
6. Résultats de l’étalonnage main-œil
Le tableau qui s’affiche vous montre le résultat de l’étalonnage main-œil (Fig. 219). Ce tableau résume toutes les coordonnées de la pièce dans les systèmes de coordonnées de la vision et du robot. Il donne également la précision de l’étalonnage de votre étalonnage main-œil.
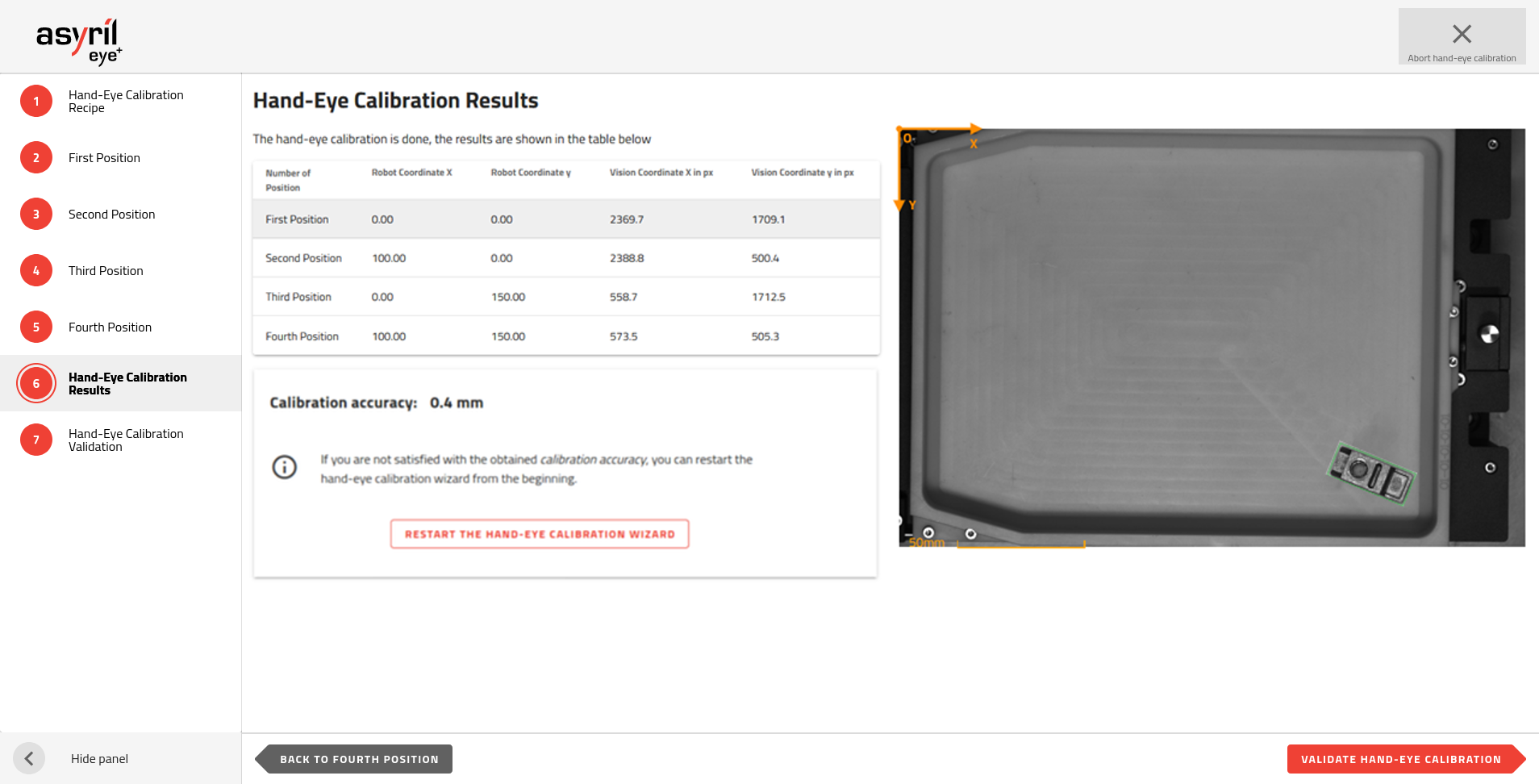
Fig. 219 Résultats de l’étalonnage main-œil
Si tout s’est bien passé, l’étalonnage main-œil est maintenant terminé. La précision de l’étalonnage vous informera sur la qualité de l’étalonnage main-œil. Si vous êtes satisfait de cette précision, vous pouvez passer à la dernière étape qui sera une étape de validation.
Si ce n’est pas le cas, nous recommandons de refaire l’étalonnage main-œil. Consultez la section Comment puis-je augmenter la précision de l’étalonnage main-œil ? pour des conseils permettant d’augmenter la précision.
7. Validation de l’étalonnage main-œil
Cette étape vous permet de valider l’étalonnage main-œil en effectuant un pick-and-place manuel.
Placez une pièce quelque part sur la plateforme, par exemple près du milieu, et cliquez sur . Les coordonnées affichées dans le tableau correspondent au système de coordonnées du robot.
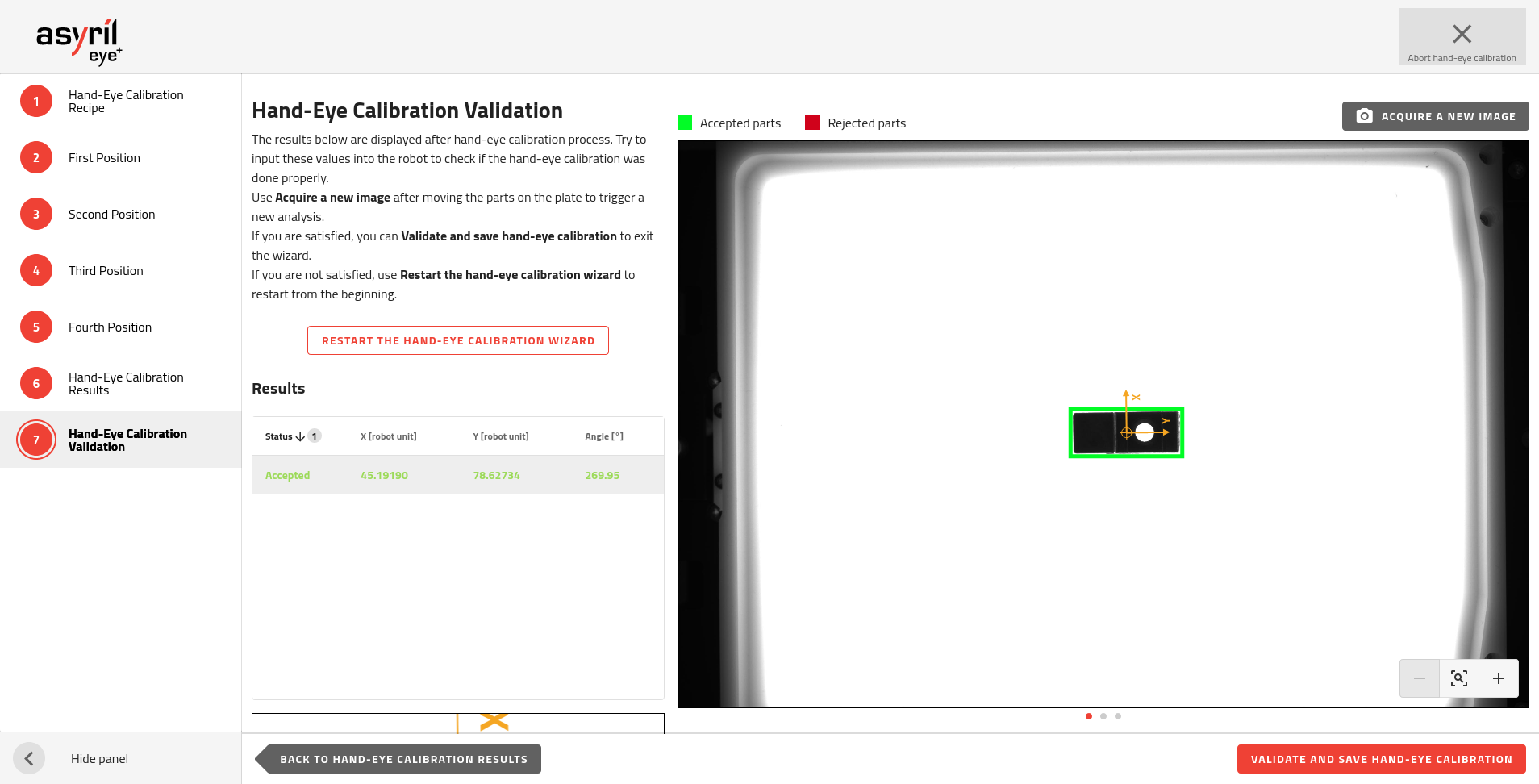
Fig. 220 Validation de l’étalonnage main-œil avec une pièce détectée
Ensuite, déplacez le robot aux coordonnées indiquées et validez que vous pouvez prélever la pièce. Si cela fonctionne, vous pouvez quitter l’assistant en cliquant sur le bouton .
Si ce n’est pas le cas, nous recommandons de refaire l’étalonnage main-œil. Consultez la section Comment puis-je augmenter la précision de l’étalonnage main-œil ? pour des conseils permettant d’augmenter la précision.
Remarque
L’étape de validation est facultative mais nous vous conseillons de la faire afin de vérifier que l’étalonnage main-oeil a été effectué correctement.
Remarque
Pour plus d’informations sur l’étalonnage main-œil, lisez la section Qu’est-ce que l’étalonnage main-œil ?.
Désormais, les coordonnées envoyées par EYE+ seront automatiquement envoyées dans le système de coordonnées de votre robot.
Important
EYE+ transpose également l’angle RZ vers le système de coordonnées du robot. EYE+ calcule un angle de décalage entre l’axe X de la vision et l’axe X du système de coordonnées du robot. Ce décalage est ensuite appliqué avant l’envoi des coordonnées.