Avertissement
Vous lisez une ancienne version de cette documentation. Si vous souhaitez obtenir des informations actualisées, veuillez consulter 5.4 .7. Configuration de l’Asycube
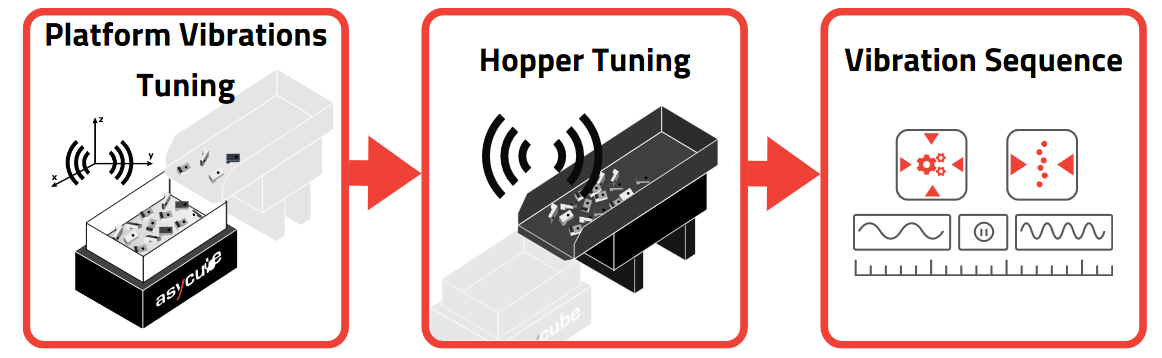
Fig. 135 Aperçu de la configuration de l’Asycube
La configuration optimale des vibrations de la trémie et de l’Asycube permet d’obtenir le plus rapidement possible de nouvelles pièces pouvant être prises par le robot. Vous devez configurer la trémie et l’Asycube individuellement.
Une vibration optimale de la trémie doit permettre une chute rapide et régulière des pièces sur l’Asycube. Il est important que le même nombre de pièces tombent sur l’Asycube avec la même durée de vibration.
Les vibrations optimales de l’Asycube doivent permettre des déplacements rapides et réguliers dans chaque direction. Un déplacement régulier signifie que les pièces doivent se déplacer dans la direction prévue pour chaque sens de vibration.
La séquence de vibrations est définie en fonction des vibrations configurées. Lorsque le système est en état de Production et qu’il n’y a plus de pièce pouvant être prise par le robot sur l’Asycube, la séquence de vibrations commence lorsqu’une commande get_part ou prepare_part est appelée.