Avertissement
Vous lisez une ancienne version de cette documentation. Si vous souhaitez obtenir des informations actualisées, veuillez consulter 5.4 .Exemple - Rockwell Studio 5000 Logix Designer ®
Cette section donne un exemple d’une intégration simple d’EYE+ avec le module EtherNet/IP dans Rockwell Studio 5000 Logix Designer ® version 31.00.00.
Conditions préalables
- Avant de commencer, veuillez télécharger les fichiers suivants :
Fichier EtherNet/IP EDS EYE+ (electronic datasheet)
Exemple de code Studio 5000 Logix Designer ®
Ces fichiers peuvent être téléchargés à partir des Téléchargements EtherNet/IP.
Une fois que vous avez téléchargé les fichiers nécessaires, veillez à installer le fichier EDS dans le dossier d’installation de Beckhoff TwinCAT :
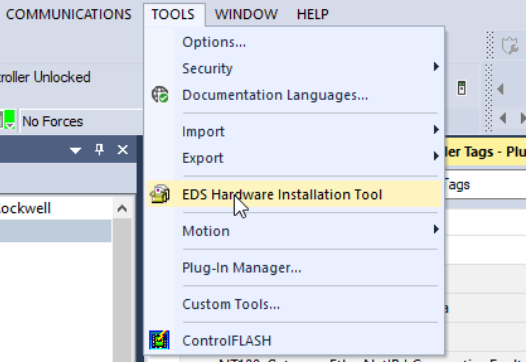
Fig. 260 Lancement de l’outil d’installation du hardware EDS
L’assistant EDS de Rockwell Automation s’ouvre. Cliquez sur « Next » (Suivant).
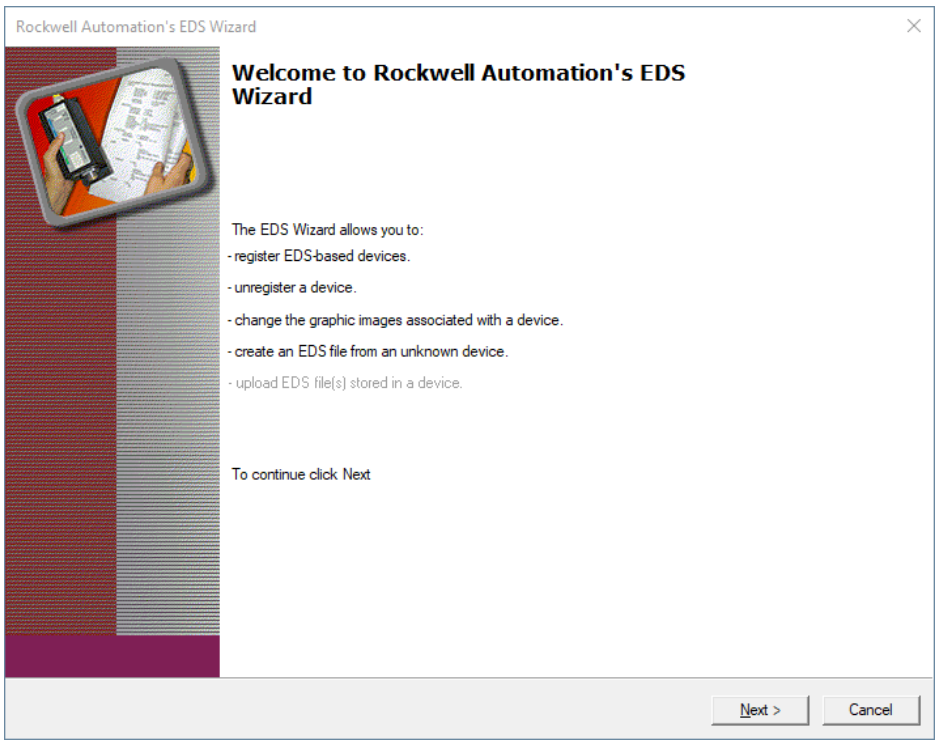
Fig. 261 Assistant EDS de Rockwell Automation
Sélectionnez « Register an EDS file » et cliquez sur « Next ».
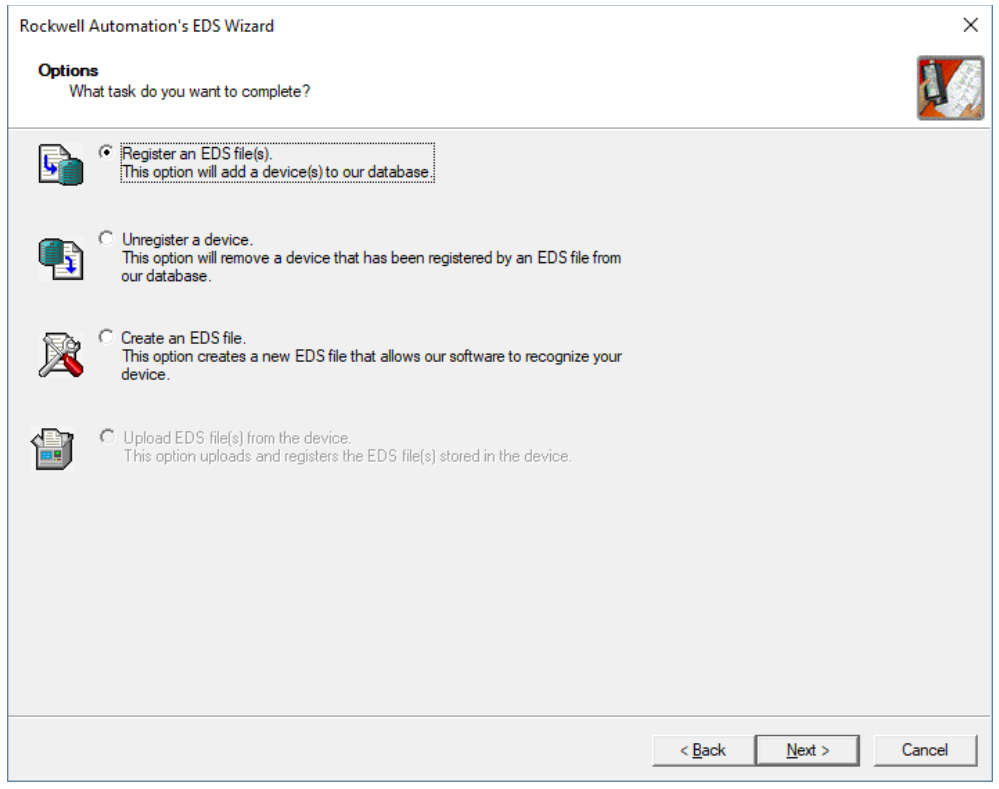
Fig. 262 Enregistrement d’un fichier EDS
Sélectionnez le fichier EDS EYE+ que vous avez téléchargé à partir des Téléchargements EtherNet/IP.
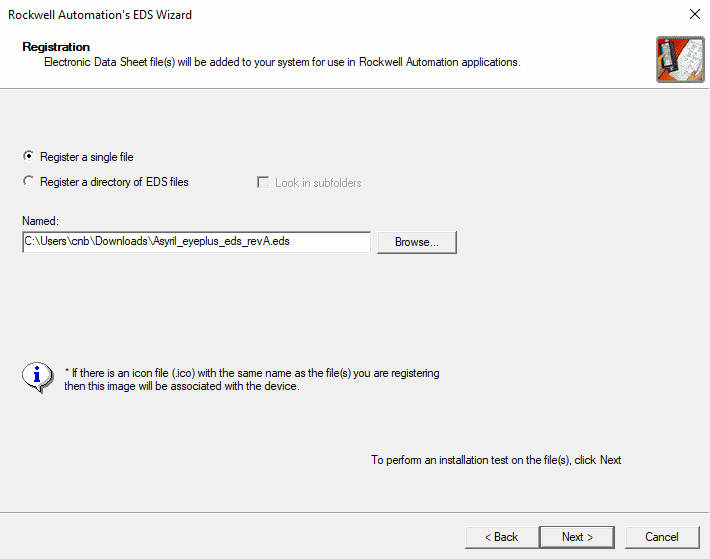
Fig. 263 Enregistrement de l’EDS EYE+
Cliquez 4 fois sur « Next » pour finaliser l’enregistrement EDS d’EYE+.
Intégration de base
Une fois que l’EDS d’EYE+ est enregistré, ajoutez un nouveau module EYE+ à votre Configuration E/S en faisant un clic droit sur votre carte Ethernet.
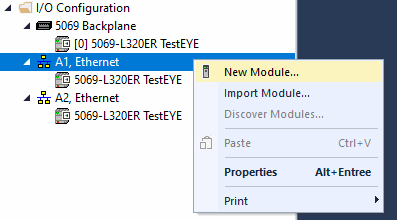
Fig. 264 Ajout d’un nouveau module
Sélectionnez EYE+ et cliquez sur « Create ».
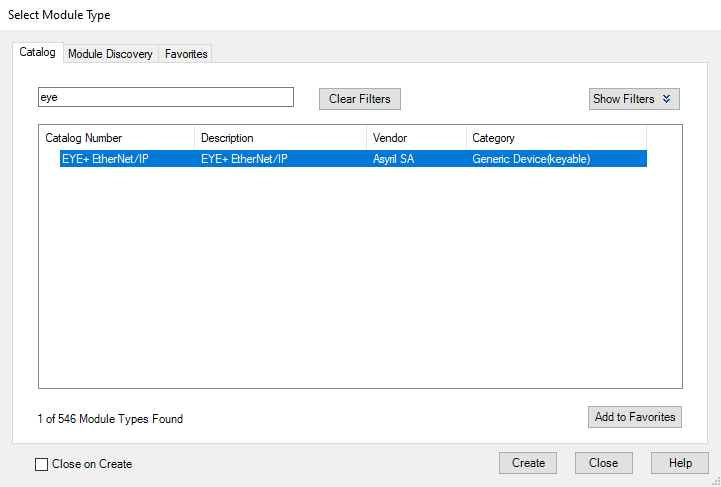
Fig. 265 Création d’un module EtherNet/IP
Pour que notre exemple de code Logix 5000 fonctionne dès le départ, donnez au module le nom « EyePlus ». Configurez les paramètres IP. L’adresse IP par défaut du module Ethernet/IP d’EYE+ est 192.168.210.10. Si vous souhaitez modifier cette adresse, veuillez vous référer à la section Configuration du module.
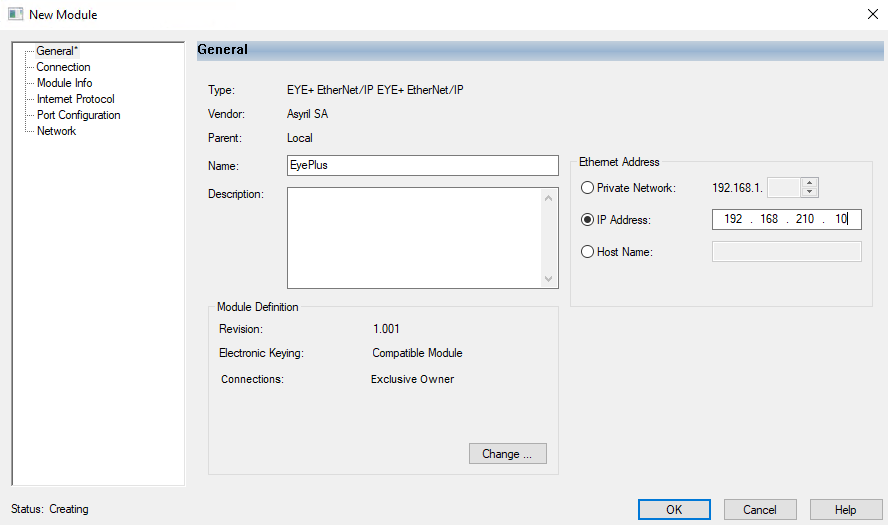
Fig. 266 Configuration du nom et de l’adresse IP
Vous devriez maintenant voir les E/S d’EYE+ dans les tags de votre contrôleur. Lorsque vous vous connectez, le tag EyePlus:I.System_State devrait être égal à 128, ce qui correspond à l’état Prêt .
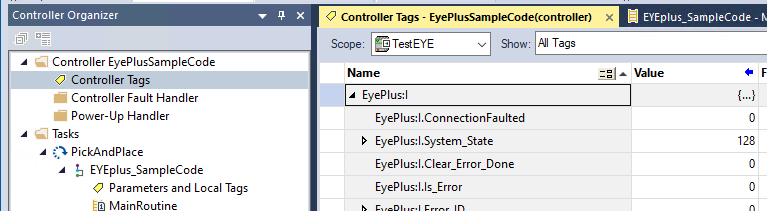
Fig. 267 Tags EYE+
Créez une nouvelle tâche, sélectionnez-la et importez un composant.
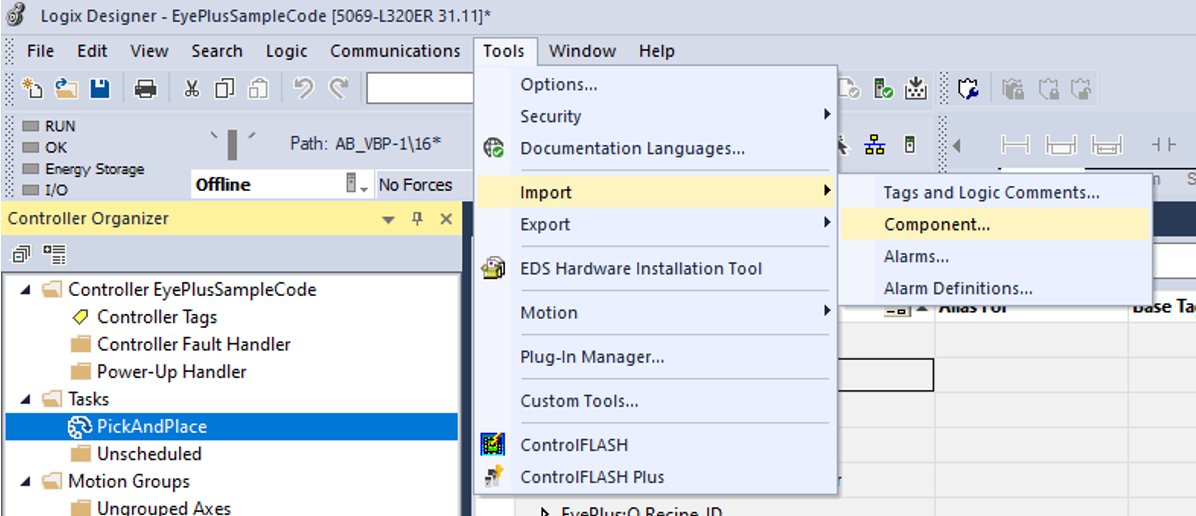
Fig. 268 Importation d’un composant
Choisissez l’exemple de code Logix.
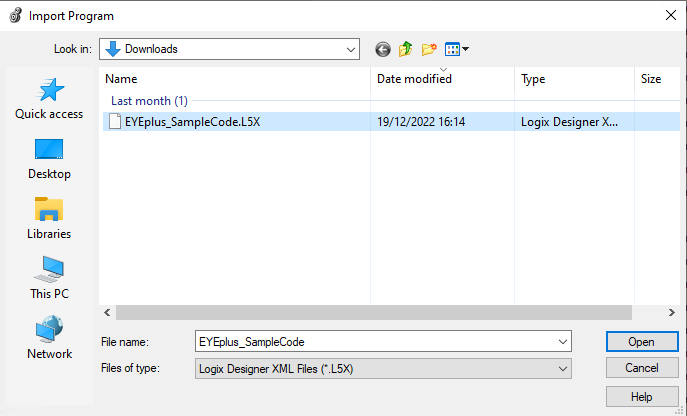
Fig. 269 Ouverture de l’exemple de code Logix 5000
Validez la configuration de l’importation en cliquant sur OK.
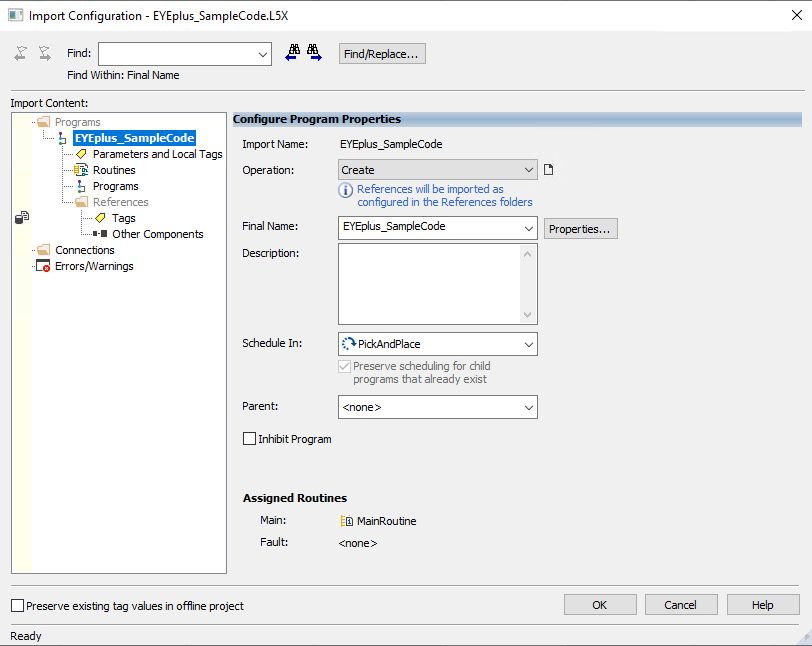
Fig. 270 Importation de la configuration
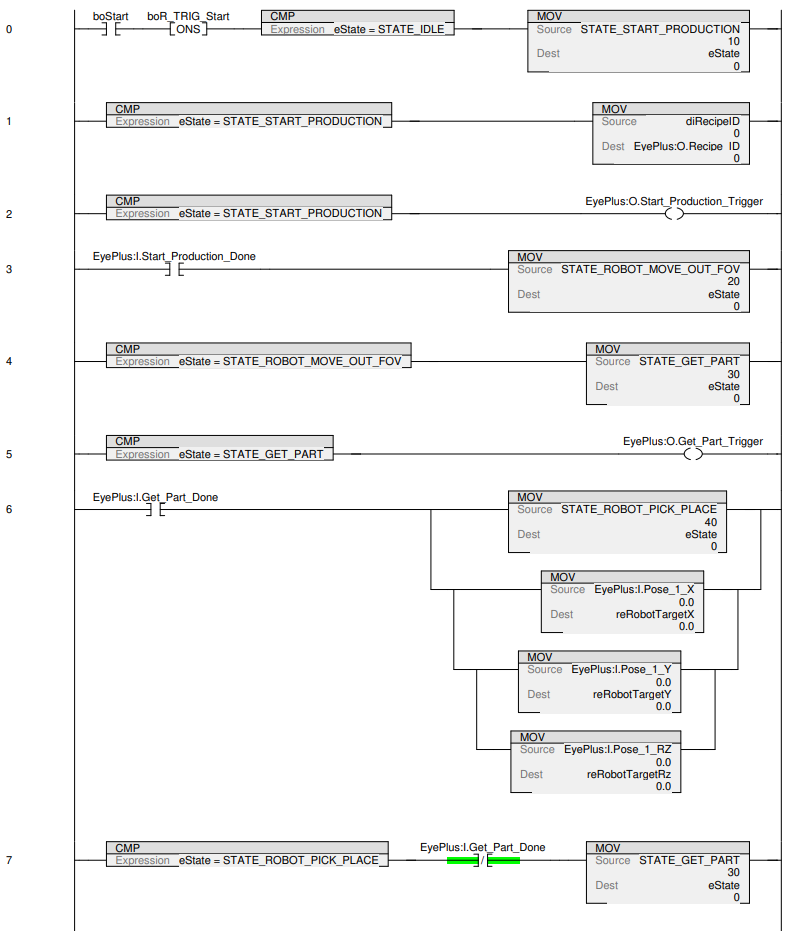
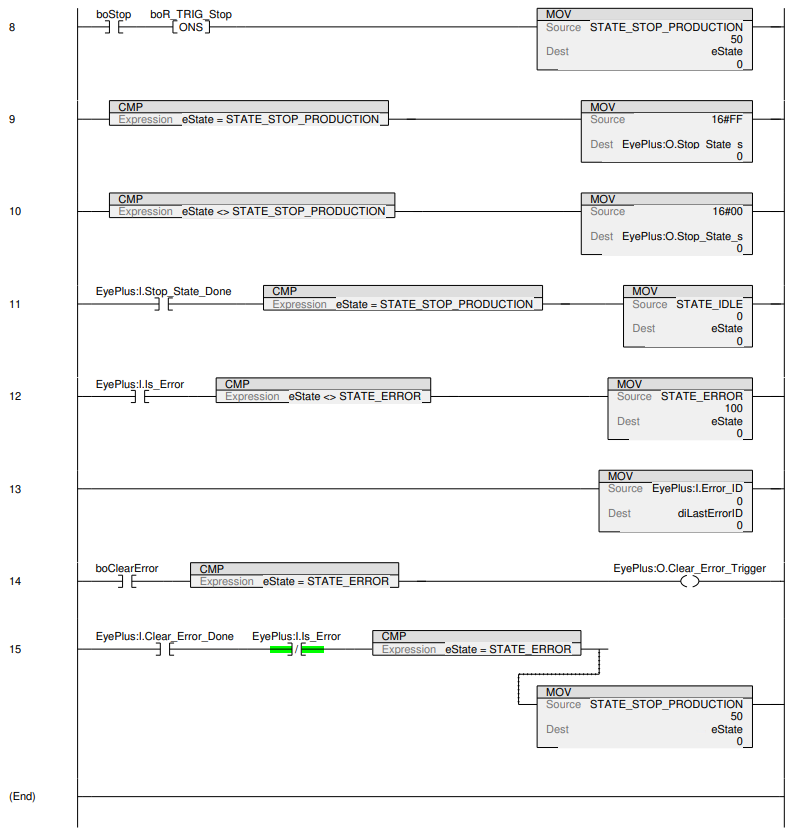
Le diagramme en échelle suivant devrait maintenant avoir été importé dans votre tâche. Vous pouvez lancer la production d’une recette précédemment créée sur votre contrôleur EYE+ en donnant à udRecipeID l’ID de cette recette, puis en donnant à boStart la valeur True. Les coordonnées de la pièce trouvée seront retournées dans reRobotTargetX, reRobotTargetY et reRobotTargetRz.